Document details
8
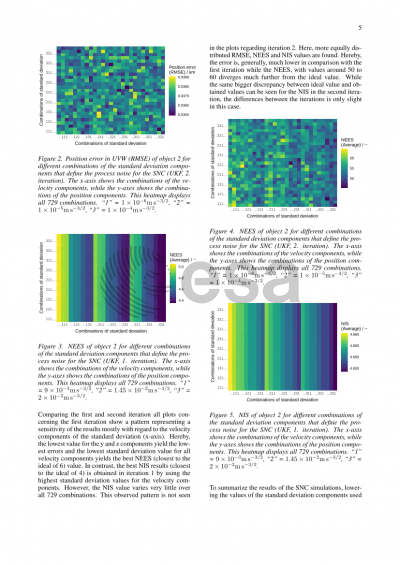
1
T. Flohrer, S. Lemmens, F. Schmitz
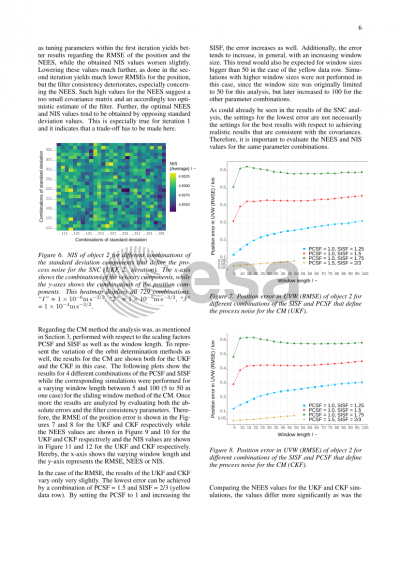
Abstract
Orbit Determination is a crucial part of Space Situational Awareness, especially, in the wake of upcoming mega constellations and the general trend towards an increased rate of orbital injection. While there are several initial and statistical orbit determination algorithms, one key aspect is the precise modeling of the process noise to accurately capture the error between the used equations to describe the orbit mechanics and reality. Two widely used methods to model the process noise are state noise compensation (SNC) and dynamic model compensation (DMC). More recently, adaptive methods, such as the covariance matching (CM) or adaptive state noise compensation (ASNC), have been developed [1].
In this paper, an analysis of statistical orbit determination using SNC, CM, and ASNC is shown. Hereby, the Radar System Simulator (RSS) that was developed at the Institute of Space Systems at the TU Braunschweig was used to simulate typical scenarios. Therefore, tracklets of an exemplary space debris object (SDO) population were simulated. Using these tracklets, the above mentioned process noise methods were applied in combination with multiple statistical orbit determination methods, such as the Unscented Kalman Filter (UKF) or Cubature Kalman Filter (CKF).
Primarily, the performed simulations have shown that the process noise indeed is a critical aspect influencing the accuracy of any orbit determination. In order to achieve realistic results, i.e. convergence between the estimated and real state as well as a consistent covariance, of high quality, the process noise needs to be tuned adequately for the respective situation. A good tuning of the SNC can significantly improve the quality of the orbit determination and achieve results that are closer to reality. Unfortunately, the SNC needs to be tuned offline with a priori knowledge of the adequate parameters. These correct tuning parameters, however, are usually not known beforehand for any given scenario. Therefore, adaptive methods could be the key to perform accurate orbit determinations regardless of the actual scenario.
This paper will show the results of process noise variants in combination with different orbit determination algorithms with regard to the convergence of estimated and real state as well as covariance truth. It will conclude with a comparison of the three stated approaches.
Preview