Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
Critical conjunctions in space are occurring at increasing frequency due to the fast-growing and intensive use of space. Evidently, mitigating the consequent risk of collisions is of outmost importance for a sustainable use of space. Prospectively, this scenario is not expected to settle down in the near future, due to the recent plans of large constellations deployment and to the trend of satellites miniaturization.
For the above reasons, collision avoidance maneuver (CAM) planning and optimization is becoming a routine task of fundamental importance for a mission’s success. The number of CAMs to be executed is expected to scale up in the future. Consequently, it is paramount to promote the development of numerically efficient methods for CAM design, possibly reaching on-board implementability.
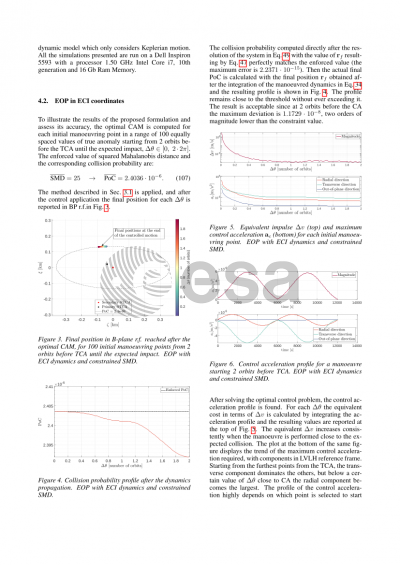
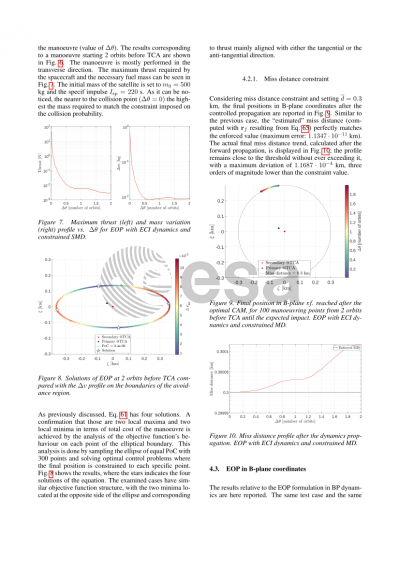
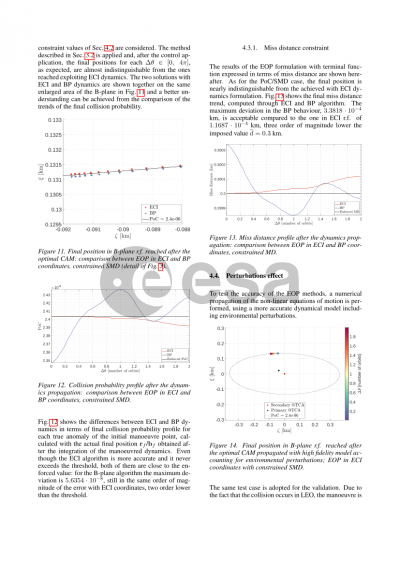
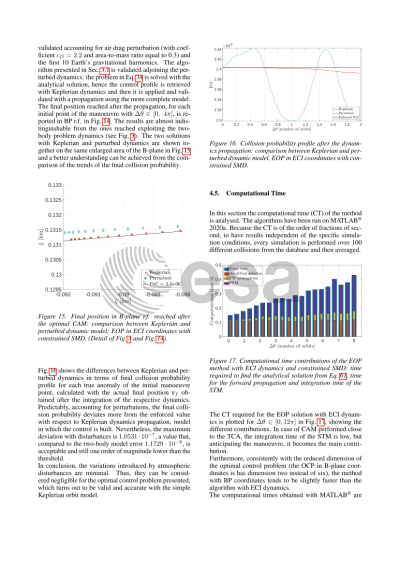
A further challenge is posed in the field by the recent technological advances in space propulsion. An increasing number of satellites are equipped with electric propulsion systems that allow to control their orbit through continuous low-thrust maneuvers. Within this framework, this paper investigates the problem of designing optimal low-thrust collision avoidance maneuvers, with the aim of developing robust and numerically efficient algorithms. To this aim, the conjunction dynamics is presented in the Cartesian reference frame and then projected onto the b-plane, centered at the non-maneuverable object. The optimal low-thrust maneuver is constrained in terms of both collision probability and squared Mahalanobis distance at the time of closest approach. A semi-analytical method and a fully analytical method have been developed in with the prospect of finding fast, reliable, and iteration-free approaches to maneuver design. The semi-analytical method is based on the linearization of the energy optimal control problem using the state transition matrix, whereas the analytical approach adds up the linearization of the collision probability. The influence of environmental perturbations is also addressed. Overall, the main assumptions of the proposed methods are constant and uncorrelated covariances, short-term encounters and spherical object approximation. The two approaches are compared in terms of efficiency and robustness in a simulated scenario, accounting for environmental perturbations.
Preview