Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
Number of space debris has been increasing and perceived as a social problem. To ensure the safety of space activities, actively removing the large sized debris is known as one of the effective methods to decrease the total number of space debris in the future, as analyzed.
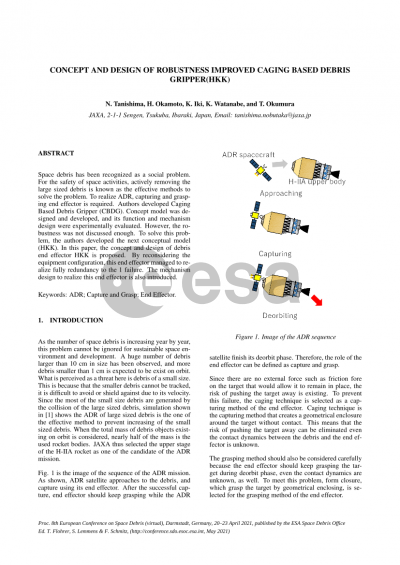
To realize the ADR of large sized debris, capturing method are required. However, since the target is uncooperative object, capturing and grasping the space debris on orbit will be very technically challenging mission. For the success of the mission, there are several technical requirements.
Since the contact dynamics, such as coefficient of friction and restitution, between the debris and the end effector are unknow parameters, the possibility of pushing the target away is existing. Even after a successful capture, the end effector must continue to keep grasping the debris during the deorbit phase. However, the same problem arises. Since the contact dynamics between the debris and the end effector are unknown, force closure might cause unintended release during the grasp. Meaning that both the capturing and the grasping method that does not affected by the contact dynamics are required.
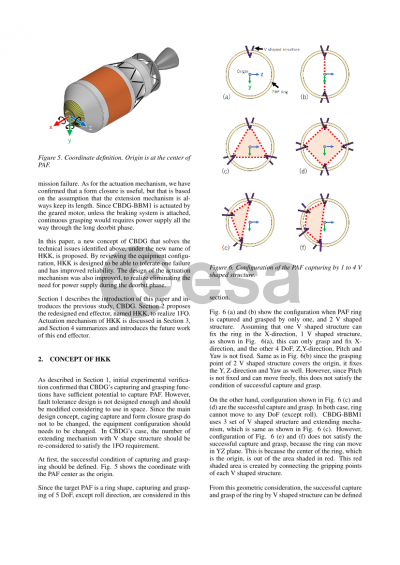
Next requirement is the misalignment tolerant. Since the target is debris that is not designed and manufactured to be approached, there are no target marker. So that the misalignment between the end effector and the debris assumed to be larger. The end effector should be designed to satisfy the system requirement of the misalignment tolerant.
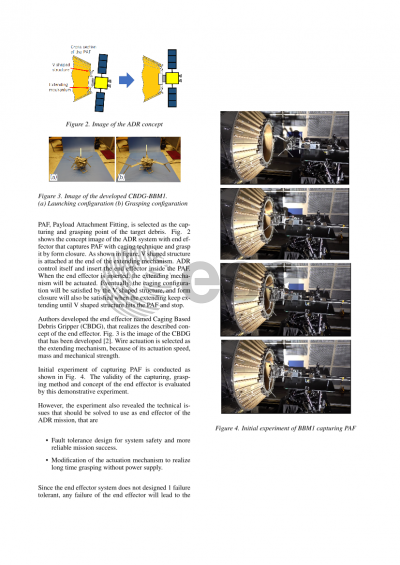
To meet these requirements, authors developed Caging Based Debris Gripper (CBDG). This gripper captures the debris with caging technique and grasp the target by form closure. Both caging and form closure are method to capture and grasp geometrically, meaning not affected by the contact dynamics. These techniques also enable larger misalignment tolerant. Concept model (CBDG-BBM1) was designed and developed, and its function and mechanism design were experimentally evaluated.
However, the robustness of CBDG-BBM1 was not enough. Since the end effector system does not designed 1 failure tolerant, any failure of the end effector will lead to the mission failure. To solve this problem, the authors developed the next conceptual model (CBDG-BBM2).
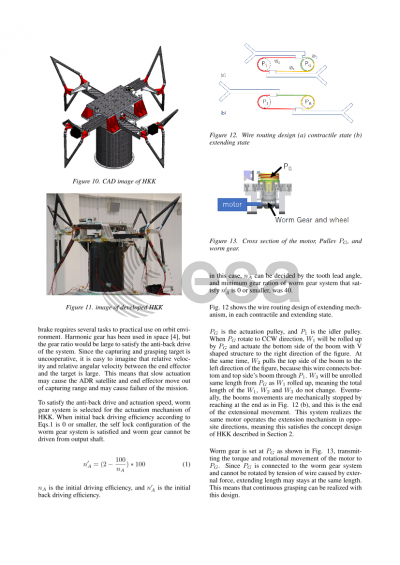
In this paper, the concept and design of new debris end effector CBDG-BBM2 is proposed. It is composed of 2 systems. Each individual system can capture the debris without the other system, meaning this end effector is fully redundancy to the 1 failure. The mechanism design to realize this end effector is introduced and evaluated experimentally. The controlling method and components are also introduced. Acceptable misalignment tolerant is evaluated analytically. These results show that this end effector satisfies the requirements and can be used for the end effector of the ADR mission.
Preview