Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
The Tracking and Imaging Radar TIRA, developed and operated at Fraunhofer FHR, consists of a tracking radar and an imaging radar, which use both a 34 m parabolic antenna. During an observation, the antenna beam follows a space object and radar data are recorded. From these data, observation vectors are generated at different instants of time, which include the measurements of range, range rate, elevation and azimuth angles. As a first option, these observation vectors can then be directly processed by a tracking filter for orbit determination. Since the pulse repetition frequency (PRF) of the tracking radar is about 30 Hz, a measurement update occurs every 30 ms. Alternatively, these tracking data can be first processed before serving as input to the tracking filter. The second option concerns the current technique implemented in the TIRA system to compute the observation vectors, which are delivered to our partners, and it is based on an averaging. Usually the measurements are averaged over several pulses (e.g. 30 pulses) resulting in a measurement update around every second. A new processing technique has been recently developed to improve the accuracy of the observables at the cost of a higher computational load compared to a simple averaging. It was shown that a processing over 30 pulses lead to good results thus yielding a refreshment rate of about 1 Hz. As a third possibility, these processed observation vectors are used as input of the tracking filter.
In our study, we want to understand which of these input data lead to the best performance of the tracking filter and the highest orbit determination accuracy. In particular, we would like to investigate how the choice of the measurement data affects the filter efficiency by examining its convergence behavior and accuracy. For instance, is it better to use raw observation vectors with a high measurement rate or observation vectors of improved accuracy, estimated over several pulses, with a lower refreshment rate?
Another aspect that we would like to analyse deals with the implementation of future real time tracking filter and the choice of adapted input data. A trade-off between filter accuracy and computational load has to be found.
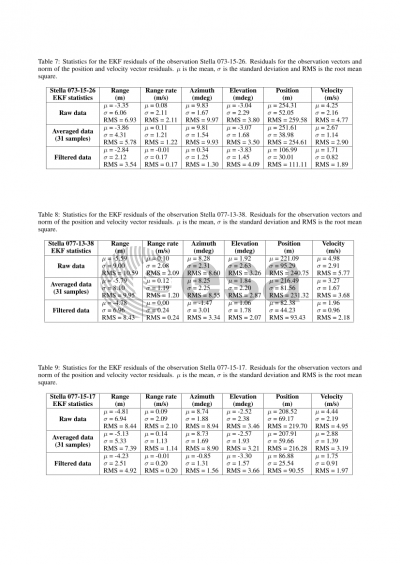
This paper focuses on three observations of the French satellite Stella performed with the TIRA system in 2019. For each pass, the observation vectors are processed according to the three above-mentioned cases and used as input of the tracking filters. We considered two different tracking filters: the extended Kalman filter and the unscented Kalman filter. In addition, the same kind of investigation is performed for an orbit determination algorithm, i.e. a batch filter.
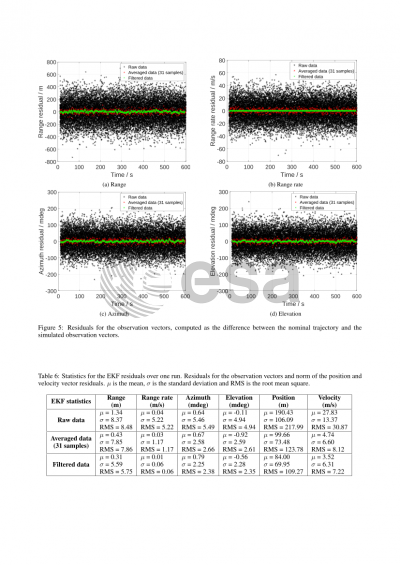
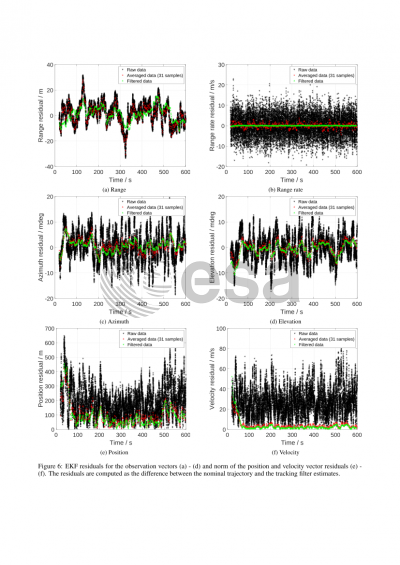
Knowing the position of the satellite over time from accurate ephemerides, the results are presented in terms of residuals between the outputs of the tracking filters and the ephemerides. The exploitation of these residuals is the key to understand the performance of the tracking filters according to the input data processing.
Preview