Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
With the advent of large constellations of small satellites for uses such as global internet transmission or weather forecasts, the need for fast and accurate initial orbit determination grows. Electro-optical sensors are a cost-efficient way of collecting observations. Several government agencies and commercial providers worldwide employ large electro-optical sensor networks to monitor the space around the Earth to detect and track the objects in orbit around the Earth. With the increasing number of objects in orbit, it is crucial to find the most efficient and accurate way to operate those sensor networks. One part of the optimized sensor operation is performing an initial orbit determination.
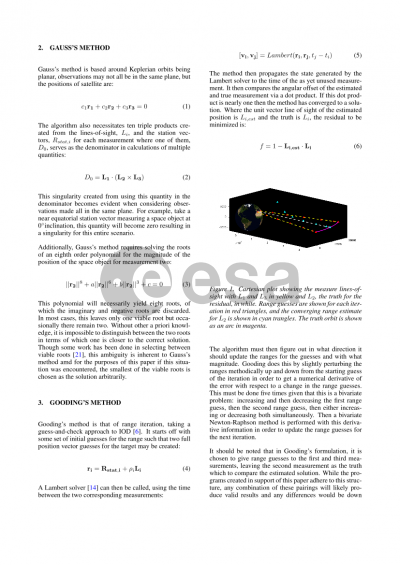
Initial orbit determination describes the process of estimating an orbit or state based solely on measurements and without orbital a priori information. Every single electro-optical measurement consists of two angles, such as right ascension and declination, with no range or rate information. Initial orbit determination methods that determine a full six parameter state use three optical observations as input. Classical methods include Gauss and Laplace's initial orbit determination methods. There are other, more recent methods of initial orbit determination. For this paper, the Gooding method is of particular interest. Past research has shown, in many cases, the superior performance of Gooding compared to Gauss and Laplace. Gooding's method is a form of range-iteration that compares the truth line-of-sight at the middle observation with that of the one it finds after processing the measurements through a Lambert solver. In this paper, also a modified Gooding method is used. For this modification, the classical Lambert algorithm is replaced by a formulation by Gim Der, called the "Superior Lambert Algorithm," " which uses universal variables. The new Lambert algorithm is expected to allow for better orbit determination results and is more robust in the orbit determination using measurements of multiple orbital revolutions.
In the sensor network optimization, the accuracy and precision of initial orbit determination need to be investigated depending on a number of factors. One of the most crucial factors is the observation spacing, that is, the time between each of the three observations. Furthermore, the orbital precision and accuracy results greatly vary with the observer locations and the orbital regime for which an initial orbit determination is sought, as the observation geometry changes. Another crucial factor is the expected measurement error in the participating sensors' observations, as geometry changes will be reflected differently within a larger or smaller measurement error.
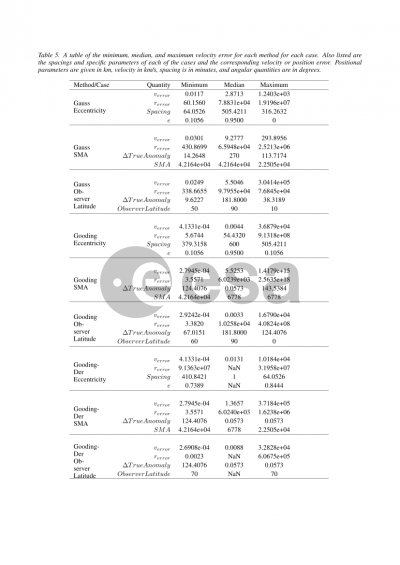
In this paper, the parameter space of observation spacing of three observations, observer location, orbital regime, and measurement errors for initial orbit determination is fully explored. The three investigated orbit determination methods are Gauss, Laplace, and Gooding and the modified Gooding method. For the observer locations, ground-based and space-based sensor locations are used. For the on-orbit observations, the observer is assumed to be deployed in the low Earth orbit. For the orbital regimes of the objects, low Earth, medium Earth, and geosynchronous Earth orbits are considered. The object states are taken from the publicly available Two Line Element (TLE) Catalog.
Preview