Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
The latest European Space Agency Annual Space Environment Report confirms, once more, the ever increasing amount of space debris orbiting around the Earth. Collisions between resident space objects will only accelerate the growth rate of the current debris population endangering space-related activities. In that context, the surveillance of the outer space becomes of paramount relevance. Current existing surveillance networks make extensive use of different observation techniques to retrieve not only updated information of the orbital elements of the object, but also evidence about its attitude and attitude motion, among others.
One of the current limitations of the tracking of space debris with optical sensors (active or passive) comes from the lack of accurate ephemerides that will not allow seeing the object within the field of view of the sensor. The constraint imposed by the field of view is significantly less stringent in passive-optical systems, but becomes critical for active systems like laser ranging stations. For our tests, the staring device is a tracking camera with a CMOS sensor on the ZIMLAT telescope at the Swiss Optical Ground Station Zimmerwald operated by the University of Bern, Switzerland. Our work focuses on the development of algorithms that allow an automated real-time correction of the pointing of the telescope, as soon as the object is crossing the field of view of the staring device, with the final aim of centring the target within the field of view of the laser beam. We highlight statistical properties such as efficiency and robustness to enable the tracking even in the most challenging observation conditions: daytime.
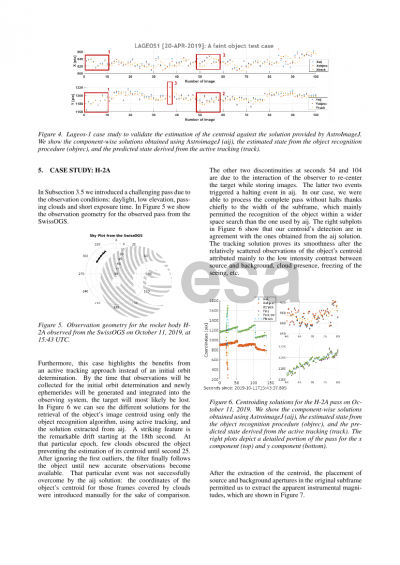
Preview