Document details
7
1
T. Flohrer, F. Schmitz
Abstract
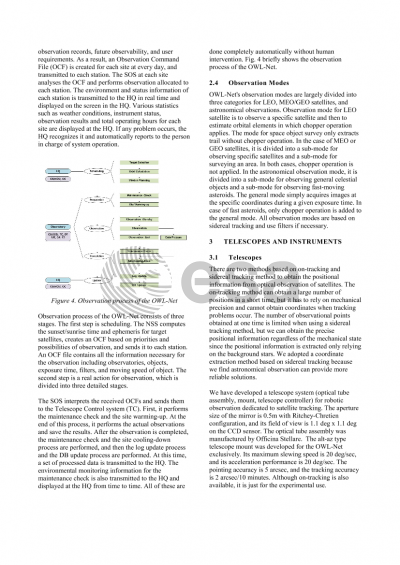
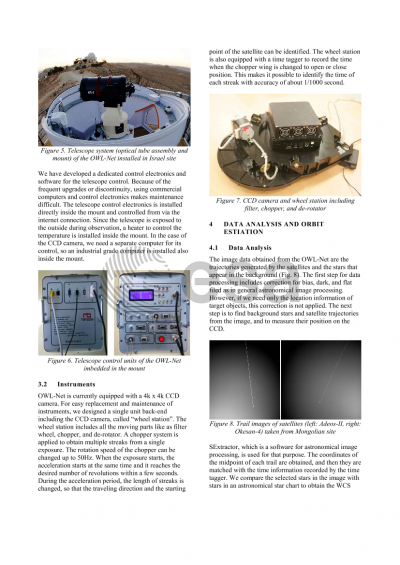
We are going to present a global network of optical telescopes developed for satellite tracking and its early test results. The OWL-Net (Optical Wide-field patroL Network) is composed of 0.5m wide-field optical telescopes spread over the globe (Mongolia, Morocco, Israel, South Korea, and USA). All the observing stations are identical, operated in a fully robotic manner, and controlled by the headquarters located in Daejeon, Korea. The main objective of the OWL-Net is to get orbital information of Korean LEO and GEO satellites using purely optical means and to maintain their orbital elements.
We have developed a telescope system (optical tube assembly, mount, telescope controller) and a station-keeping system (enclosure, dome, environment monitoring system) for robotic observation dedicated to satellite tracking. The aperture size of the mirror is 0.5m with Ritchey-Chretien configuration, and its field of view is 1.1 deg on the CCD sensor. The telescope is equipped with an electric-cooled 4K CCD camera with 9um pixel size, and its pixel scale is 0.9 arcsec/pixel. A chopper wheel with variable speed is adopted to get more points in a single shot. Its rotation speed is accelerated from 0 to a constant value which makes differences in trail lengths and results in identification of the direction of motion. Each chopped trail has time-tagged information with a few milliseconds precision. The CCD camera and all the rotating parts (chopper wheel, de-rotator, filter wheel) are integrated into one compact component called a wheel station. Each observatory is equipped with heavy duty environment monitoring system including weather sensors, cloud sensors, electric power sensors, security cameras, etc. for robust robotic observation.
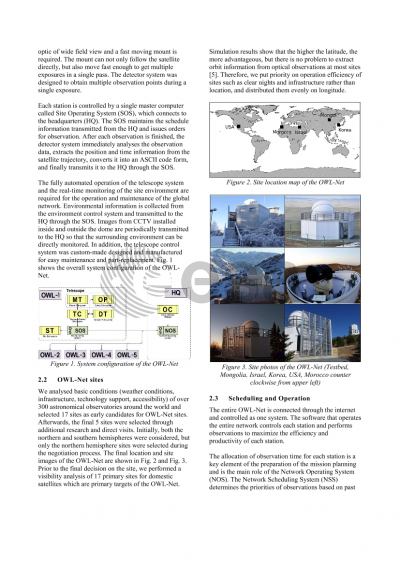
The headquarters is composed of an observatory status monitoring system, an automatic scheduler, a network operating system (NOS), an orbit calculation server, and a database server. The NOS controls the headquarters and the whole observatory network. Schedules for observation are generated and updated automatically by the scheduler, and then translated into an observation command file (OCF) which is a pre-defined ASCII file. An OCF is transferred to each site via internet. The site operating system (SOS) receives the OCF, and then sends it to the telescope controller which interprets it and makes observations. Observed data is directly saved into the data storage and immediately reduced into time and coordinates data in an ASCII file. The SOS collects reduced data and environment monitoring data and all the information collected at each site is gathered into the headquarters in quasi real time.
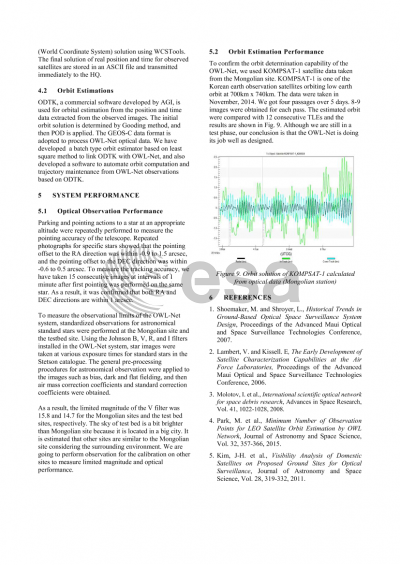
The first site was installed in Mongolia May 2014 and produced some test data. We could get an image every 20 seconds and ~100 trail points in a single exposure. Each point is time-tagged by ~1/1000 second precision. For one of best cases, we could estimate satellite position with RMS ~ 0.5km accuracy in the along-track with only 4 exposures (~100 points). Installation of the whole network finished at the end of 2016. Test run and site calibration will be finished at the end of 2017. We expect the full-scale operation of the OWL-Net to start in 2018.
Preview