Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Efficient sensor tasking is a crucial step in building up and maintaining a catalog of space objects at the highest possible orbit quality. With increased sensing capabilities, also the amount of objects that can be and are thought to be kept in the catalog is increasing. Realistic object numbers can easily reach over 100’000 objects. It is crucial to note that for efficient collision avoidance and surveillance, individual information of those objects is sought rather than merely statistical information.
Sensor resources are necessarily of a much smaller number compared to the objects. Different sensors have different capabilities in terms of field of view, detection capabilities and measurement noise levels. Especially the latter are not time-fixed but time varying depending on the observation condition and observation mode the sensors are used.
This makes sensor tasking a crucial step in order to ensure the best possible space object catalog. The best possible space object catalog can be defined as fulfilling a number of criteria. As requirements, the catalog is sought to be most complete, containing all objects of interest in the near earth space. Furthermore, the objects are sought to be characterized by at least their orbital probability density function (pdf). Ideally, the pdf is ideally smallest as possible, making the orbit most accurate and precise. In general, the uncertainty grows in the absence of observations. This is due to either the absence of all the necessary deterministic information to model the orbit most accurately, such as shape, attitude material properties, which leads to uncertainties, e.g. in the solar radiation pressure forces, limited models and computational capabilities, or the at least in part stochastic nature of processes affecting the propagation, such as drag.
The pdf is hence influenced by the number of observations, the spacing and their quality. In the approach in this paper reformulates sensor tasking as an optimization problem. In the optimization, weighted space areas are used as an optimization parameter, with the constraints of spacing and measurement frequency in order to ensure the best possible orbits as in smallest possible pdf with highest possible object coverage for a given sensor suite. As an example, surveys for geosynchronous region are used utilizing two different optical sensors. One narrow field of view sensor, delivering high accuracy and precision measurements and one wide field of view sensor with diminished measurement precision. Sensor specific limitations such as reposition times, quantum efficiency, read out times and noise are taken into account, same as local horizon limitations and celestial background noise sources and their effect on the probability of detection. The results are compared to traditional survey and tracking strategies.
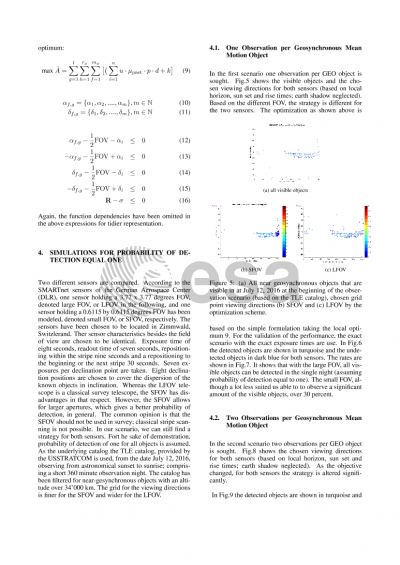
Preview