Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Debris fragments from the hypervelocity impact testing of DebriSat are being collected and characterized for use in updating existing satellite breakup models. One of the key parameters utilized in these models is the ballistic coefficient of the fragment which is directly related to its area-to-mass ratio. By definition the area in the ratio is the cross-sectional area perpendicular to the direction of motion. However, since the attitude of fragments can vary during their orbital lifetime, it is customary to use the average cross-sectional area in the calculation of the area-to-mass ratio. The average cross-sectional area is defined as the average of the projected surface areas and has been shown to be equal to the one-fourth of the total surface area of a convex object.
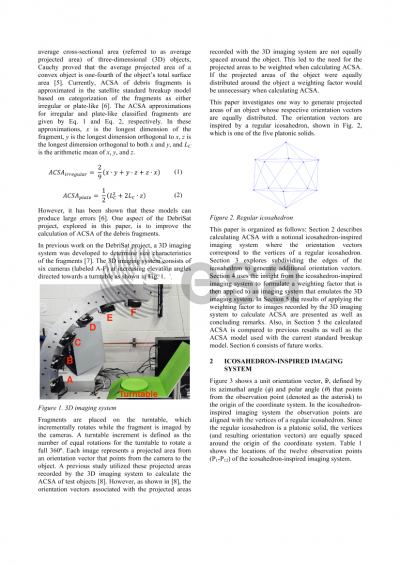
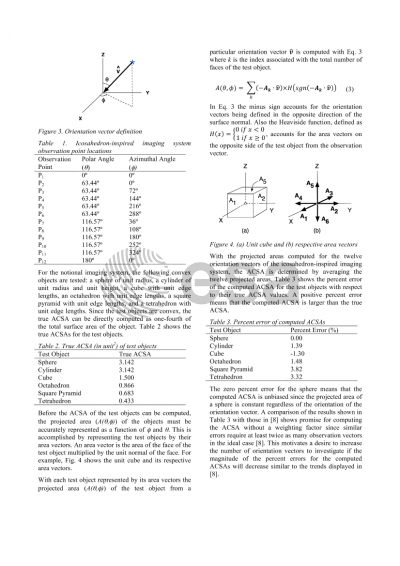
An imaging system based on the volumetric reconstruction of a 3D object from multiple 2D photographs of the object was developed for use in determining the size characteristics (i.e., characteristic length) of the DebriSat fragments. Since the 3D imaging system consists of six cameras at equally spaced elevation angles, the resulting camera orientation vectors are not evenly spaced on the hemisphere above the fragment while it is imaged. This leads to the need for a weighting factor associated with the projected areas measured by the cameras. However, if all of the orientation vectors were evenly spaced a weighting factor would be unnecessary. An icosahedron is a platonic solid with twenty equilateral triangles as its faces. By definition of a platonic solid, the vertices of an icosahedron are evenly spaced from each other. Subdivision of the edges of the icosahedron leads to vertices that are almost evenly spaced. This paper investigates a notional imaging system where the orientation vectors of the cameras are inspired by the vertices of an icosahedron. Also, this paper explores the subdivided icosahedron for additional camera orientation vectors to improve the image information used in the calculation of the average cross-sectional area. Finally, orientation vectors of the notional system are used to motivate a weighting factor for the existing 3D imaging system; that is, particular images from the 3D imaging system are weighted to approximate orientations from the notional system. Results of the average cross-sectional areas of various shapes computed using (i) the notional icosahedron-inspired orientations and (ii) the icosahedron-inspired weighted images from the 3D imaging system are presented and discussed.
Preview