Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Tether systems have been used in space for various scopes since the beginning of the space era. They have been investigated as electrodynamics power generators or motors, momentum exchange and orbital stabilization assets or formation flying connection and pulling ropes. In the most recent years, in the context of ESA (European Space Agency) Clean Space Initiative and general interest in space debris removal missions, they have been included as one of the key technologies for capturing and de-orbiting large space target debris by pulling them. Tether would act as a flexible link, elastic or rigid, between the chaser spacecraft and its capture system, consisting, for instance, in a harpoon or a net. Tether elasticity is an important element to take into account for the controllability of the stack. On one side, a high elasticity tether leads to a simpler control problem and a better shocks reduction. On the other hand it may include the presence of a potential resonance with sloshing and an increased risk of collision after the de-orbit burn.
In the ESA TRP (Technology Research Program) study titled Elastic Tether Design and Dynamic Testing, Aero Sekur, with its local partners Aviospace and Gottifredi Maffioli, is currently studying and developing both a rigid and a highly elastic tether. Main objectives of the TRP are two; first to increase the TRL of the tether for ADR (Active Debris Removal) missions to 5-6 through an extensive environmental and functional test campaign at both material and assembly levels. Second to deliver two full-size (100 meters long) rigid and elastic tethers as fully functional Engineering Model (EM) with associated datasheets tabulating nominal and extreme values for parameters providing also a clear view of the design parameters-performances dependencies for the future CE (Concurrent Engineering) assessments to be done at system and mission levels. The on-going TRP is related to the activities for the e.Deorbit mission, now in Phase B1, and it reflects the ESA implementation plan of technologies required for Active Debris Removal (ADR) missions.
The current paper describes the activities performed so far in the study, meaning until the development tests at assembly level on tethers scaled models, and the relevant results obtained. Main requirements (thermal about heat fluxes, chemical about thrusters plume impingements, physical about elastic constant and performance about load conditions) are presented. Relations with the common use ground-based products, as the “shock cords”, are also underlined. Then the configuration and final design, presented at CDR (Critical Design Review), of both the tether systems is shown, together with the description and the properties, obtained after dedicated tests, of the candidate materials for all the system parts. The related technological and manufacturing processes (braiding and seaming) for both the types of tethers are also included in the text. Moreover the first scaled models produced for the Development Tests at assembly level will be depicted and the first test results shown. In conclusion an overview of the planned activities until the final wrap-up will be presented.
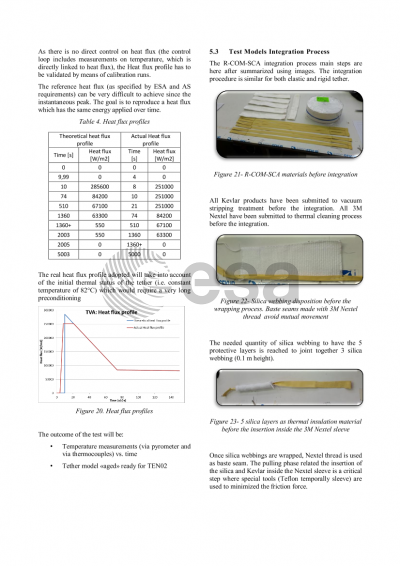
Preview