Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Obtaining accurate trajectory information of newly detected objects by surveillance sensors (optically or via radar) represents a great challenge. Due to the fixed orientation of their field of view the short duration of the tracks generated by these kinds of sensors does not allow to compute orbits accurate enough for long term observation and cataloguing. In order to correctly catalogue the object (e.g for statistical data analysis in radar beam park campaigns sensing sub-catalogue objects) a new concept has to be developed.
Our solution to this problem is the 'Stare and Chase' concept, a combination of a surveillance sensor ('Stare') with a tracking sensor ('Chase') working together in strong coordination. From the stare sensor data a rough initial orbit estimation of the object is generated allowing the tracking sensor to aim at the object obtaining the whole pass. By using classical orbit determination algorithms on the collected data of the full pass it is possible to obtain an accurate orbit.
The work performed on this topic within the framework of an ESA study focuses on different aspects.
Initial orbit determination algorithms are based on the observations recorded by the surveillance sensor which are spaced in a very short arc (1°-10°) and on the computed orbit (using four or six Keplerian elements). The accuracy of the predicted orbit depends on multiple parameters. Hence a simulation campaign is performed in order to test the limits of the concept and the different algorithms. It contains an exhaustive parametric study and sensitivity analysis using multiple variables such as the orbital regime, the geometry of the pass or the observation arc length or accuracy and compares the results to the actual orbit.
Finally an observation campaign combining optical pointing determination, initial orbit determination and satellite laser ranging on space debris targets at Graz SLR station presents the full potential of the 'Stare and Chase' technique. All measurements were performed within a single pass and without a priori knowledge of any orbital information.
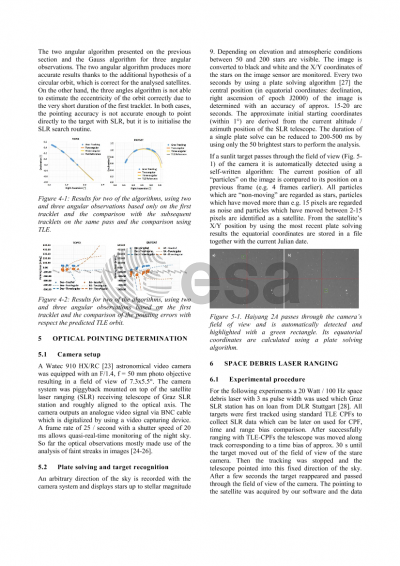
An analogue astronomy camera is piggyback mounted on Graz' SLR telescope and monitors a field of view of approximately 7° of the sky. The telescope is then moved to an arbitrary position ‘staring’ into the sky displaying stars up to 9th order magnitude. Once a sunlit space debris object passes through the field of view it is automatically detected by our software. By using a plate solving algorithm analyzing the stellar background its X/Y position on the sensor is transformed into the equatorial coordinate system. From the data immediately a Consolidated Prediction Format (CPF) orbit prediction file is generated and used for tracking the satellite. From the first 'stare' observation to tracking the satellite with the new CPF it only takes less than 2 minutes.
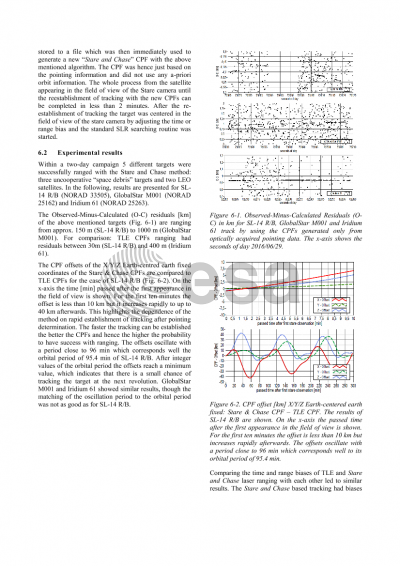
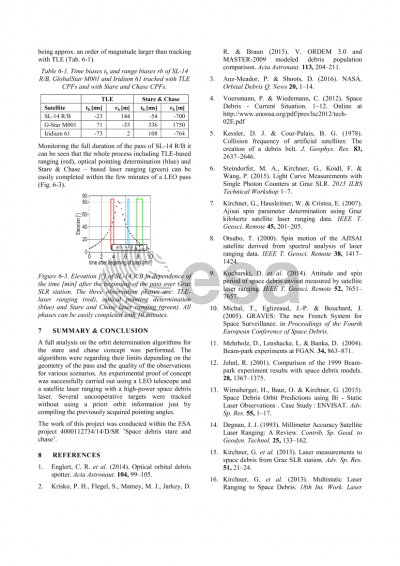
As soon as tracking is established the SLR system starts 'chasing' the target. We successfully perform space debris laser ranging using the 'Stare & Chase' predictions with a 20W/100Hz space debris laser to several cooperative and uncooperative targets. The targets were chosen to have two line element (TLE) CPF predictions in order to be able to compare the CPF results with respect to accuracy and time- or range-bias. We also present the Observed-Minus-Calculated residuals of selected targets. Furthermore we show that compared to TLE-CPFs the X/Y/Z offset of the Earth-Centered Earth-Fixed coordinates is in the order of a few kilometers for the first ten minutes after the first appearance of the target in the field of view.
Preview