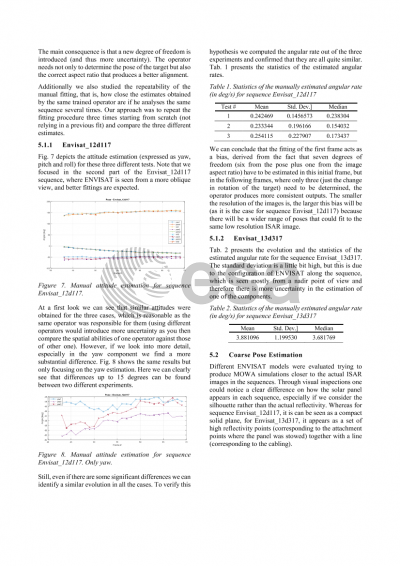
Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Determining the kinematic state of objects in space is a topic of major concern for both researchers and spacecraft operators. The scientists and engineers are, e.g., interested in the influence of the attitude changes on the orbit of the object, be it for long-term propagations of the state vector or for re-entry predictions, driven by the varying geometric cross-section. For the operators the capability becomes highly important in the case of contingency situations, when communications with the satellite might be lost and solutions have to be found.
Different approaches are currently being explored, such as laser ranging, light-curves (variation of the brightness of space objects in the visible region) or Inverse Synthetic Aperture Radar (ISAR) techniques.
Our work focuses on the latter, in which the apparent motion of the object w.r.t. a single radar station is used to determine the geometry and motion of the reflecting object. The problem of unknown attitude states during the ISAR image generation is often practically solved by assuming a state. This can therefore limit the application of the results deduced from such images, e.g. to checking the presence of components on an object. However, under some assumptions, the attitude state can be estimated from sequences of images or when the shape of the object is known.
This paper presents the analysis and results of applying computer vision techniques to estimate the pose of a space object only from ISAR images. More specifically, three scenarios have been evaluated:
• Coarse attitude estimation from a single image, or eventually a sequence of images, and knowledge (in the form of a simplified CAD model) of the target
• Pose estimation refinement, which can be either the refinement of a single frame coarse estimation, either extracted automatically or with the assistance of an operator, or the processing of a whole sequence, where the output of one frame is considered as the coarse estimate of the following one.
• Model-less pose estimation, when there is no information about the model, but a sequence of consecutive ISAR images is available.
A large advance has been made in the area, resulting in techniques able to automatically extract valuable attitude information of an object basely only on ISAR imagery, but also in the identification of those situations showing higher difficulties.
Preview