Document details
5
1
H. Lacoste
Abstract
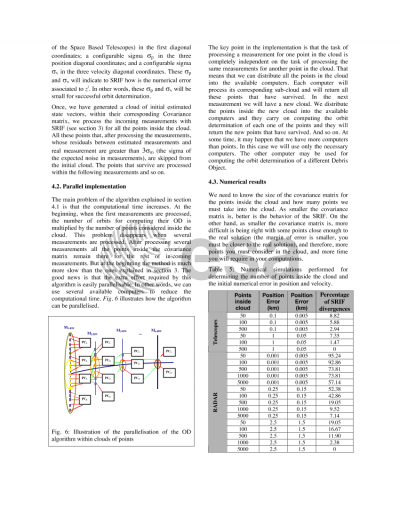
In this work we present an algorithm for computing Orbit Determination for Space Debris population. The method presents a high degree of parallelism. That means that the number of available computers divides the computational effort. The context of this work and the later scope is to have the capability of cataloguing and correlating the Space Debris population. In this sense, as better the accuracy provided by the orbit determination is, more accurate will be the estimation of the state vectors corresponding to the debris objects and better will be the accuracy of the future catalogue of Space Debris. As more objects we can determinate the corresponding orbit, more complete will be the future catalogue. Therefore numerical tools for orbit determination are a key point in the development of a future ESSAS. The first time that a new object is observed, six measurements (these measurements may come from RADAR, Ground Based Telescope or Space Based Telescope) are required for computing an Initial Orbit Determination (IOD). After that, the Initial Estimated State Vector (IESV) is improved within the next-coming measurement. The idea of this method is the following. From six initial measurements, we compute the IOD following the same ideas of [1]. We compute also the initial knowledge covariance matrix (IKCM) corresponding to the IESV. In general, the numerical error of the IOD is too big for processing the following measurements with a conventional numerical filter (like the Square Root Information Filter (SRIF)). The problem is that the improvement of the accuracy in the IOD is not an easy task in those cases with large initial error. However the computed IKCM give a realistic approximation of the committed error in the IOD. The proposed algorithm uses the IKCM for generating a cloud of IESVs. All the IESV inside the cloud are processed with a new and much smaller IKCM by using SRIF. In such a way that the ones that are close enough to the real state vector (and thus its real IKCM is in agreement with that imposed) survive. Those ones that are far away of the real solution make SRIF to diverge and are skipped from the initial cloud. We will show numerical results and we will compare the accuracy with the numerical results obtained by applying directly the results of the IOD to the SRIF. Implementation of the algorithm in a cluster of PCs will also be addressed. The reported algorithm has been implemented in the Advanced Space Surveillance System simulator (AS4) and developed by DEIMOS Space. The project has been partially funded by the CDTI (Ministerio de Ciencia e Innovación (Spanish Government)).
Preview