Document details
2
1
T. Flohrer, R. Moissl, F. Schmitz
Abstract
In the modern world, the space safety is of growing concern for all of the spacefaring nations. This is mainly due to two major factors: accelerated increasing number of artificial space objects formed from break-up events as well as the rapidly growing mega-constellations and launch rates which significantly increase the artificial objects population around Earth. Within ESA’s Space Safety Programme, a cornerstone has been created focusing on automated collision avoidance to reduce operational costs, late commanding paths and operations concepts as well as means for coordination of operators and catalogue providers.
GMV is currently upgrading the Autonomous Collision Avoidance System (AUTOCA) developed under ARTES contract, within the scope of ESA’s CREAM activity S2P-S1-CR-01 “Automated avoidance manoeuvre decisions and design“. This system aims at its use for large fleets (e.g. large operators in GEO and future mega-constellations in LEO and MEO) and also orbit raising scenarios with full-electric satellites (e.g. orbit transfer from LEO to Upper-LEO or from LEO/GTO to GEO). It is important to mention that within the scope of this activity, additional prototypes will be integrated in the system. Within this paper the focus is placed on three prototypes related to the measurements and catalogue data: Data Fusion, Orbit Propagation and Artificial Intelligence/Machine Learning (AI/ML) techniques for Covariance Matrix and State Vector predictions.
With respect to the Data Fusion, it is now quite common that one or more satellite operators receive Conjunction Data Messages (CDMs) from several or different Space Situational Awareness (SSA) providers. In that case, when these CDMs are received, a way to combine the available information is highly desirable, in order to compute a so-called consensus solution. Within AUTOCA, the problem of finding a common solution has been handled using the Covariance Intersection (CI) algorithm for Gaussian cases, by taking a convex combination of the means and covariance.
Regarding the Orbit Propagation, AUTOCA looks into the enhanced State Transition Matrix (STM) method. The goal is to improve the accuracy with respect to the linear orbit propagation while keeping the computational effort lower than numerical propagation. To this aim, the simple STM propagation is enhanced by including the higher-order effects of the central gravity. When it comes to uncertainties due to avoidance manoeuvres, AUTOCA propagates with Gates model accounting for proportional pointing errors assuming a Gaussian distribution. The model is inserted within the velocity covariance inflation matrix. The reference frame for the covariance calculation is chosen such that the direction of the x-axis is the same as the direction of the ∆V. The y and z axes can be chosen in any convenient way, as long as they define a proper coordinate system.
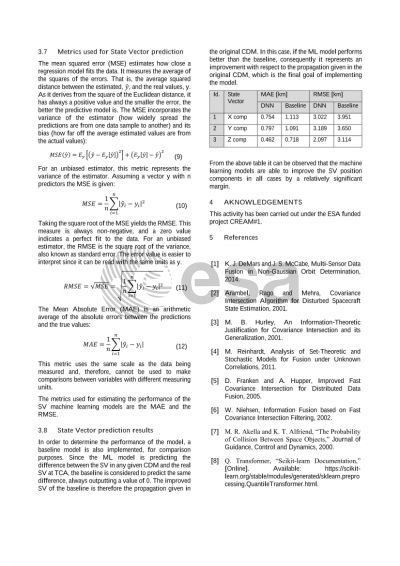
From the AI/ML perspective, AUTOCA applies ML algorithms to predict the covariance diagonal components and the State Vector positions of the secondary object. For the covariance prediction (24h and 48h from the current CDM update, 72h before TCA and TCA) the output provided by a Long-Short Term Memory (LSTM) algorithm is passed through an Attention Mechanism, helping the model on the CDM’s quality of information. The output is after passed through a Deep Neural Network (DNN) algorithm. The State Vector predictor is composed of three DNN models. Each component of the state vector position (X, Y, Z) of the secondary has its own DNN algorithm. The models for the State Vector prediction are used to perform predictions at TCA, for both LEO and GEO regimes.
The paper presents the details of the methodology applied in each case, simulation results as well as the design.
Preview