Document details
2
1
T. Flohrer, R. Moissl, F. Schmitz

Abstract
The democratization of space access increases the demand for high quality Space Situational Awareness (SSA) services. Mission analysis and collision risk assessment necessitate accurate orbital population knowledge, typically stored in the form of space object catalogs [1]. To comply with some minimum requirements in orbital accuracy and timeliness, a vast surveillance network needs to be paired with capable sensor tasking and data processing algorithms. At the core of such algorithms is the observation-correlation process, through which the state of known (or newly detected) objects is updated based on incoming measurements of unknown origin.
The vastness of the orbital space and the high development and operating costs of sensor infrastructure result in relatively long re-observation times, adversely affecting the quality of tracking data. In addition, and due to Earth orbit being a highly demanded strategical asset, the data association problem is further complicated by non-cooperative maneuverable spacecraft. Automated means to identify and estimate unknown maneuvers is a strong requirement for capable Space Surveillance and Tracking (SST) cataloguing systems. In addition, an ideal SST algorithm should be able to properly identify new launches, object re-entries, break-up events and spacecraft maneuvers.
A statistical framework that naturally allows for a time-varying population cardinality was presented by Mahler [2], under the concept of Finite Set Statistics (FISST). This framework deals with the definition of Random Finite Sets (RFS), which can be thought of as a random variable over all finite subsets of the state space, e.g., a set of random state vectors where the number of vectors is also random. The concept of RFS soon attracted the Multiple-Target Tracking (MTT) community, resulting in the development of novel multi-object filters, such as the Probability Hypothesis Density (PHD) [3] and Generalized Labeled Multi-Bernoulli (GLMB) [4]. The latter has seen a broad acceptance within the tracking community as it provides a full history of object tracks via a closed form solution (conjugate prior) in the presence of undetected objects, false observations, and object birth. Thereafter, under any possible data association scenario, the multi-object state will always be (backward) traceable and take the form of a GLMB distribution.
Implementations of the GLMB filter for maneuvering targets, or more generally, Jump Markov Systems (JMS), are already available in the literature [5-6]. Common approximations for unknown maneuver dynamics consider the use of equivalent process noise [7], or adaptive model estimates based on optimal control [8]. While the former provides a computationally efficient approximation to unknown dynamics, its applicability to the space environment is limited due to the highly non-linear nature of orbital motion, e.g. changes to apoapsis altitude are more efficient near the periapsis. Approaches based on optimal control, on the contrary, present high computational demands that confront with the combinatory nature of MTT. Within this work, we propose to bridge the gap between these two alternatives through the use of computationally efficient control distance metrics [9]. Unknown maneuvers will then be characterized in terms of control metrics that rely on approximate dynamical models, which are still capable of capturing the main physics underlying orbital motion.
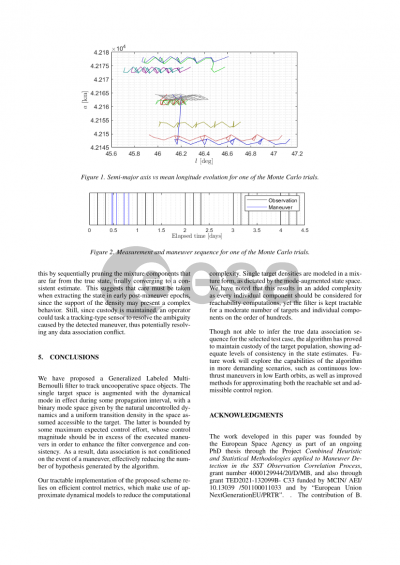
A simulated space surveillance scenario is used to evaluate the performance of the proposed multiple maneuvering target tracking filter implementation, drawing comparisons with the general approach based on variable process noise levels. In fact, the interaction between newborn targets and maneuvered states will be further investigated.
Preview