Document details
2
1
T. Flohrer, R. Moissl, F. Schmitz
Abstract
Active Debris Removal (ADR) is necessary for sustainable orbital environment. To ensure ADR is possible for any kind of mission, many technologies must be developed, space-qualified, and implemented. Of course, the standardisation of these technologies would help and simplify the way forward, so the development of the servicer to perform ADR could be unique.
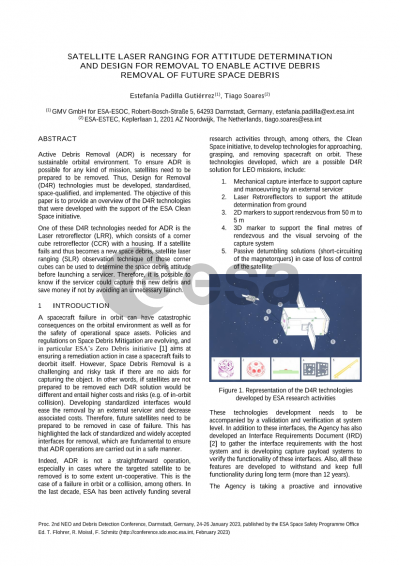
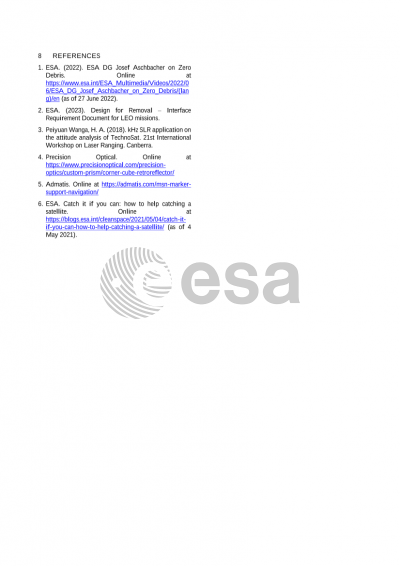
The ESA Clean Space initiative has the mandate to further develop this path. The future Copernicus Expansion missions will embark Design For Removal (D4R) features to be actively removed at their EoL in case they fail. Within these D4R features, Clean Space is working on passive markers or aids to support navigation with the development of two marker types: 2D markers for 50 to 5 m range navigation support and 3D markers for 5 to 0 m navigation support (close-proximity operations).
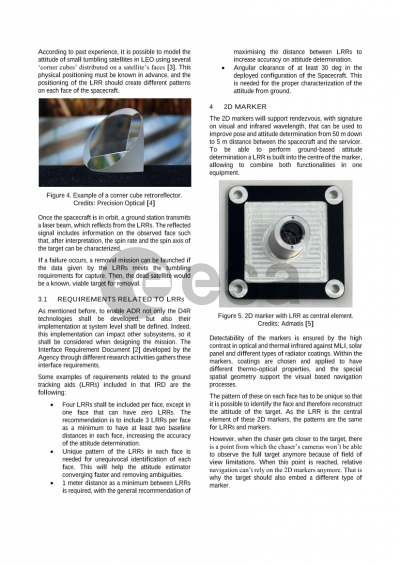
The 2D markers will support rendezvous on both visual and infrared wavelengths. They can be used to improve pose and attitude determination from 50 m down to 5 m distance between the target spacecraft and the servicer. They will be equipped with a laser retroreflector (LRR) in the centre to facilitate ground-based attitude and spinning determination using satellite laser ranging from ground. The LRR consists of a corner cube reflector (CCR) with a housing.
If a satellite is unable to control its attitude at the end of its lifetime or due to a failure, it may begin to spin due to external or internal torques acting on the spacecraft. With the help of the satellite laser ranging (SLR) observation technique conclusions about the attitude of such rotating satellites can be drawn. Therefore, these small corner cube reflectors are mounted on the markers in the target satellite, so it is possible to know before launching the servicer if it can capture this new debris which is spinning at the determined spin rate or save money if not by avoiding an unnecessary launch.
All these features are developed to withstand and keep full functionality during long term (>12 years) LEO environment. Detectability of the markers is ensured by the high contrast in optical and thermal infrared against MLI, solar panel and different types of radiator coatings. Within the markers, coatings are chosen and applied to have different thermo-optical properties, and the special spatial geometry support the visual based navigation processes. All materials and components are subjected to relevant environmental tests and the full prototype assembly is going through qualification tests to ensure flight readiness for integration into future spacecrafts.
Nevertheless, it is a difficult process with many challenges as not only the technology shall be developed, but also its implementation at system level shall be defined. Indeed, this implementation can impact other subsystems because it has not been considered from the beginning of the Copernicus Expansion missions design.
Future steps will focus on how to apply D4R to other type of satellites (small satellites in LEO, big satellites in GEO, etc), and how to generalise the technologies involved.
Preview