Document details
1
1
T. Flohrer, R. Jehn, F. Schmitz
Abstract
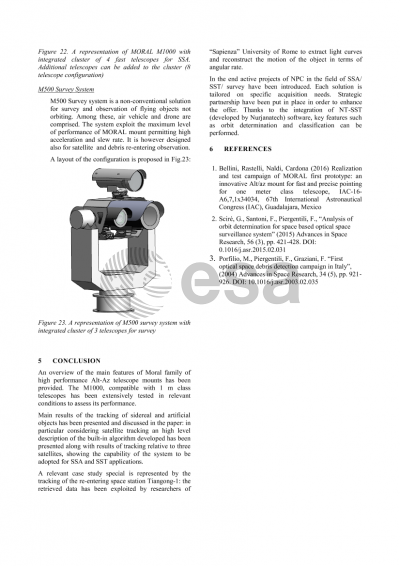
MORAL (Mount robotic alt-azimuth) are a family of alt-az mounts that can be equipped with payloads ranging from 500 to more than 1000 mm in aperture developed by N.P.C. New Production Concept Srl. The project started in 2014 as a direct response for the tracking of fast objects, such as LEO satellites and space debris in the frame of SSA activities.
The goal of the project has been that to minimize mechanical errors and optimize the control in order to achieve excellent performances in pointing and during tracking.
An intense testing campaign in relevant conditions has been scheduled and performed to verify system performances for pointing and tracking at different slew rates and considering different targets (including sidereal targets and artificial objects).
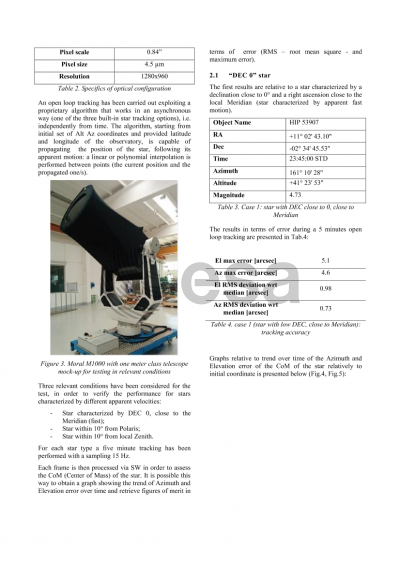
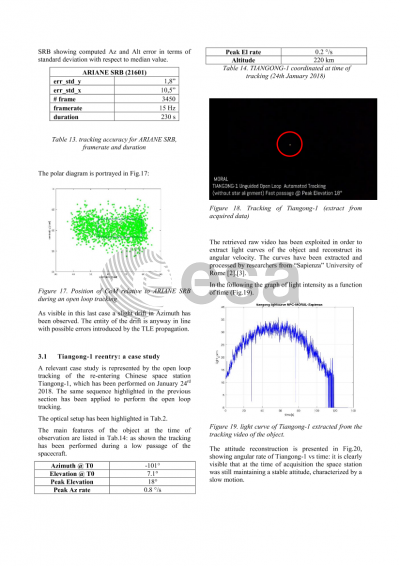
In particular Moral M1000 (suitable for telescopes up to 1 m in diameter) has been recently exploited for the tracking of the reentering uncontrolled Chinese space station Tiangong-1 during January 2018 in the frame of an Italian national campaign for the monitoring of the station, that saw the involvement of a network of different sensors (operated by universities and private observatories).
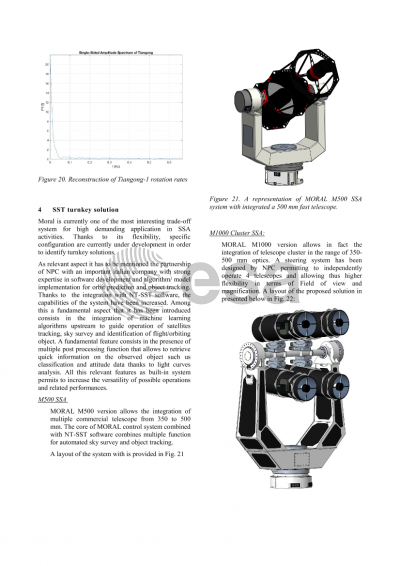
The space station has been tracked by MORAL during a fast 6 minute passage (at low elevation) using an open loop approach. Retrieved data has been exploited by researchers from "La Sapienza" University of Rome to determine and reconstruct the object attitude, in a synergic collaboration between academy and industry.
The setup adopted to perform the campaign will be addressed: results retrieved during outdoor testing campaign are addressed in the paper. This includes accuracy in sidereal tracking and a focus on main results and figures of merit achieved in the tracking of artificial objects (including Tiangong-1). These aspects will be discussed within the paper along with some details relative to the mount control and in-house developed tracking algorithms.
Preview