Document details
1
1
T. Flohrer, R. Jehn, F. Schmitz
Abstract
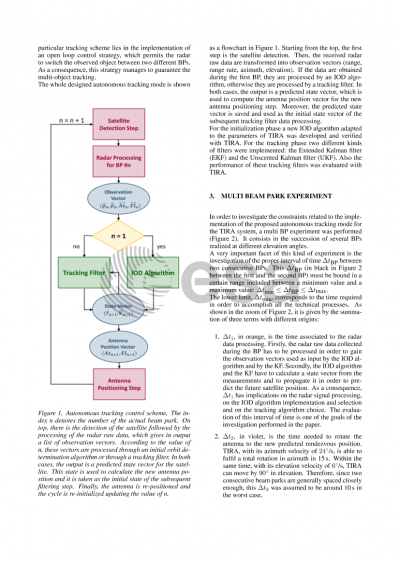
This paper investigates the realization of an experimental autonomous tracking mode for the TIRA (Tracking and Imaging RAdar) system, developed and operated at Fraunhofer FHR. The idea, in fact, is to give to the radar the possibility to track autonomously any kind of space object crossing its field of view, without resorting to external information such as the Two-Line Element set (TLE). This mode can be useful e.g. after a fragmentation, in order to determine the orbit parameters of the newly created small debris. The scheme of the autonomous tracking mode consists basically of two phases: the acquisition one and the tracking one.
During the acquisition phase the antenna operates in a beam park mode: i.e., it is fixed to a particular position monitoring a certain volume of the sky.
When an object crosses the antenna beam, it is detected by the radar (detection step).
Then, data obtained through this observation are processed by means of an Initial Orbit Determination (IOD) algorithm in order to find an estimation of a future state vector for the detected object.
Once this state vector is calculated, the antenna is rotated to the new foreseen rendezvous position (positioning step).
After the positioning phase, the tracking phase is initialized with the outputs of the IOD. This last phase, realized by processing data through a Kalman Filter (KF), consists in the alternative repetition of detection and positioning steps until the desired accuracy in the estimation of the orbital parameters is achieved.
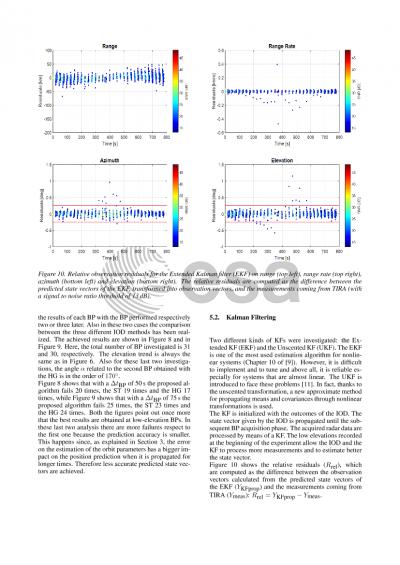
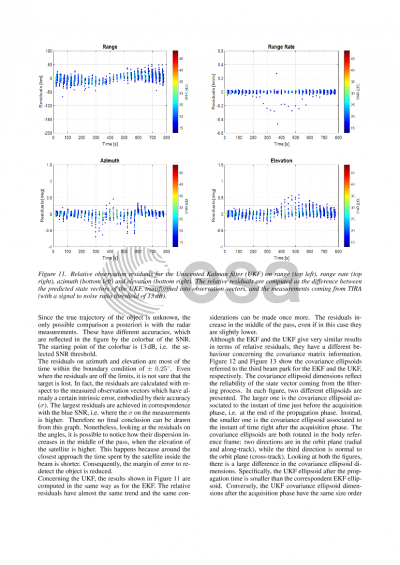
Concerning the acquisition phase, a new IOD algorithm has been developed and verified with TIRA. For the tracking phase, two different kinds of filters have been implemented: the Extended KF (EKF) and the Unscented KF (UKF). Also the performance of these tracking filters has been evaluated with TIRA.
This paper focuses on one experiment which has been conducted by observing Envisat with TIRA. In detail, a multi beam-park experiment has been performed, in which several beam parks have been realized sequentially at different elevation angles with a time-spacing of about 25 seconds.
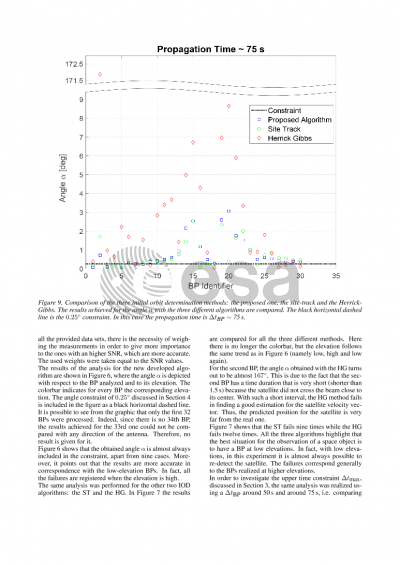
Specifically, the new IOD algorithm has been applied to each beam park observation in order to study the influence of the antenna elevation on the algorithm performance. This has been accomplished comparing the algorithm prediction with the TLE of the object. This investigation reveals that the best observation geometry (in terms of accuracy) corresponds to observations at low elevations. Moreover, an additional comparison has been carried out between the results achieved using different IOD algorithms (i.e. the Site Track one and the Herrick-Gibbs one). This final comparison evinces that the proposed algorithm gives slightly more accurate results for the performed experiment.
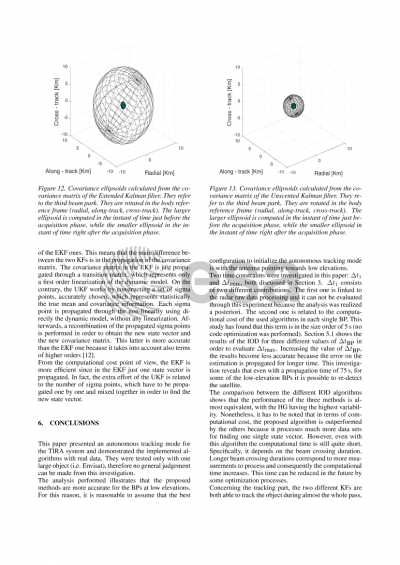
In addition, tracking results are presented in terms of KF accuracy, covariance matrix propagation and residuals on observation vectors. A trade off between the two proposed KF is shown in the paper: both the KF are able to track the satellite during the whole passage. Nonetheless, while the UKF provides more reliable information about the state vector, thanks to its statistical propagation of the covariance matrix, the EKF is more efficient from the computational cost point of view.
Preview