Document details
1
1
T. Flohrer, R. Jehn, F. Schmitz
Abstract
The development of space technology and the growth of the number of missions since the beginning of the Space Race has caused a serious associated problem, the uncontrolled spread of space debris that jeopardises active satellite networks. For this reason, as part of the Space Situational Awareness Programme, ESA is carrying out researches and developing technologies that allow tracking space debris exhaustively. In this sense, building/populating and updating a catalogue of man-made space objects is a mission of vital importance that requires great accuracy and computational efficiency.
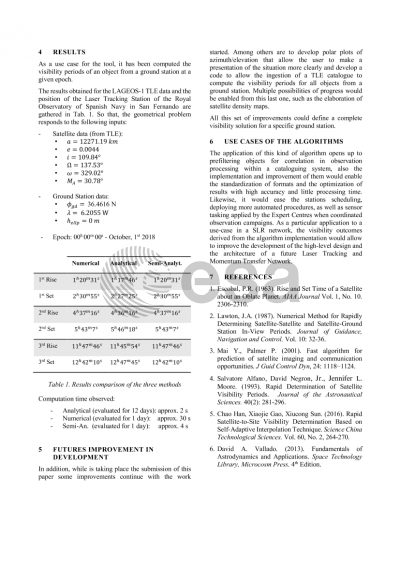
The topic of this task is the development of a faster and more reliable utilisation of short to medium-term orbit prediction algorithm to satellite visibility at a given ground station. The resolution of the satellite visibility problem has to begin with the study of the more simplified “geometrical propagation”. Here, the movement of the satellite is governed solely by the Keplerian motion, which allows us to obtain recursive approximations. From this point, it will be possible to increase the difficulty of the problem, by understanding how perturbations affect the satellite visibility. For instance, in the variation of the orbital parameters and directly conditioning the visibility range of the satellite from a specific ground station.
The application of this algorithm opens up to prefiltering objects for correlation in observation processing within a cataloguing system, also the implementation of this method would additionally enable the standardization of formats and the optimization of results with high accuracy and little processing time. Likewise, it would ease the stations scheduling, deploying more automated procedures, as well as sensor tasking applied by the Expert Centres. As application to a use-case in a SLR network, the visibility outcomes derived from the algorithm implementation would allow to improve the development of the high-level design and the architecture of a future Laser Tracking and Momentum Transfer Network.
Preview