Document details
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
The population of the Low Earth Orbit (LEO) with satellites is increasing every year. To prevent collisions of a satellite with a debris object, or even massive collisions like the Kessler syndrome, it is crucial to have accurate up-to-date orbit data about as many objects as possible. This is part of Space Situational Awareness (SSA).
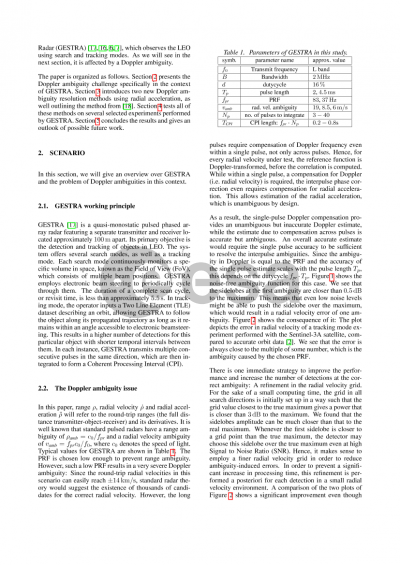
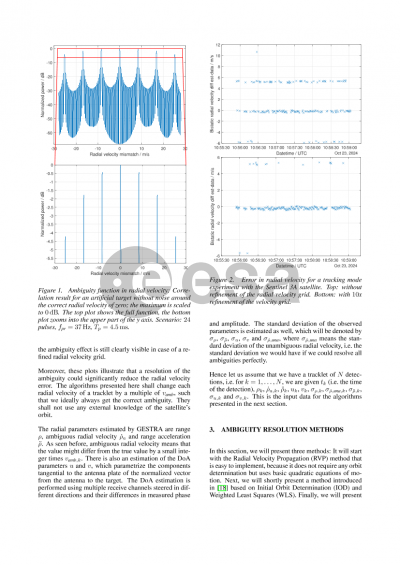
The German Experimental Space Surveillance and Tracking Radar (GESTRA) contributes to this goal by providing the opportunity to observe the LEO continuously with different search and tracking modes. It can provide parameter estimation of range, radial velocity and others. Here, the radial velocity does not reach its theoretical accuracy due to ambiguity: Typical pulsed radars, which have much shorter pulses and higher pulse repetition frequency (PRF) due to smaller ranges, can estimate the Doppler by integration of multiple pulses only. In these cases, the Doppler is inherently ambiguous with an ambiguity equal to the PRF. Often, this can be resolved, because due to the application, some Dopplers are unlikely. In space surveillance, this is typically not the case, because the PRF is very small and the possible span of radial velocities is very large. Instead, the Doppler is visible within a single pulse, which could be used to resolve the ambiguity. For GESTRA however, it turns out that the Doppler accuracy given by the single pulse is insufficient; the detector often produces estimations that lie one ambiguity next to the correct one. This can induce a bistatic radial velocity error of up to 15m/s.
The final paper presents two methods to resolve this issue by combining multiple detections. They both assume the existence of detections with appropriate parameter estimations, already combined into tracklets. The first method chooses the most likely radial velocity estimation based on the propagation of previous detections in every step. The second method uses a statistical tracking filter and its convergence on noisy data. In both methods, multiple options for the first detection are propagated through the tracklet and the choice among them is made a posteriori. Due to high and non-constant radial acceleration coarse time spacing, the methods need to implement a higher-order motion model.
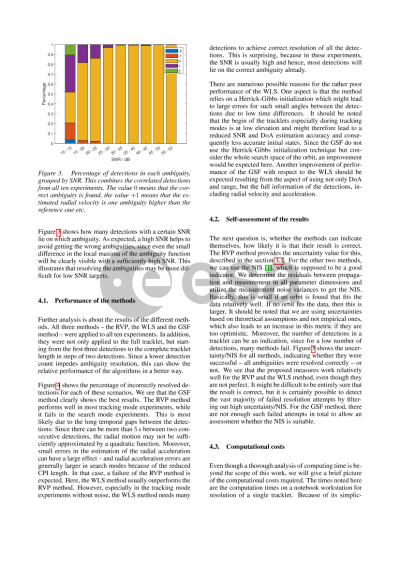
Both methods are tested with real-world data from search and tracking modes and compared in their performance. The final paper also investigates how well the methods can provide a measure of their confidence in the correctness of the results. It shows that whenever there are enough narrowly spaced measurements of a strong target, it is usually possible to resolve the ambiguity. However, in search modes, the reliability decreases due to fewer detections and larger time gaps. By using the radial velocities whenever the ambiguity resolution is successful, this can improve the estimation accuracy for radar systems like GESTRA considerably.
Preview