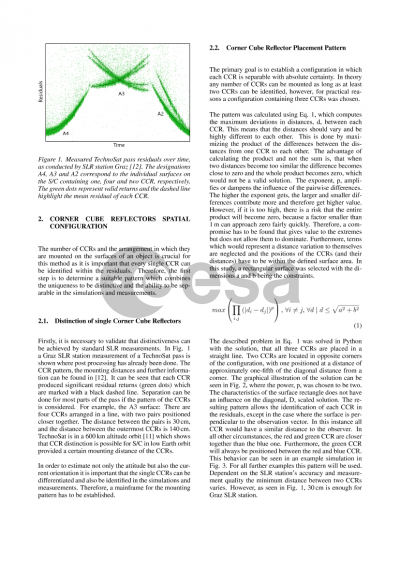
Document details
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
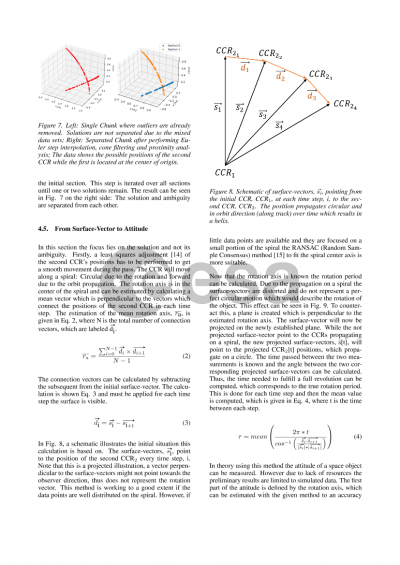
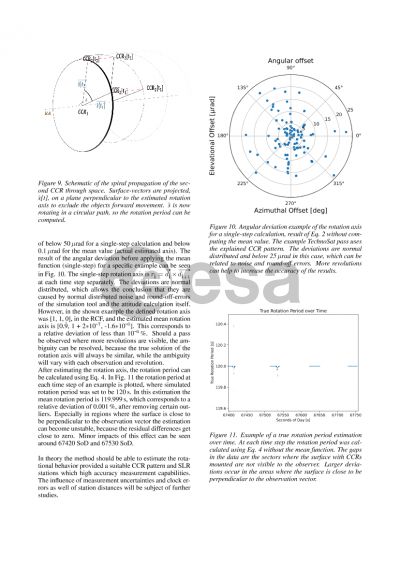
This work discusses a method to determine the rotation axis and apparent rotation period of space debris from ground. The method requires simultaneous observations of two Satellite Laser Ranging (SLR) stations of a target on which Corner Cube Reflectors (CCR) are mounted. The target of in-orbit-servicing or de-orbiting is supported by estimating the rotational characteristics from ground. In order to develop and test the method, the Space Research Institute’s SLR residual simulation tool was used. Given a specific pattern of the CCRs on a spacecraft’s surface the superior precision of SLR allows for an identification of the individual units. The true distances, mounting distances, of the CCR arrangement has to be known and can be defined in the simulations. This work shows that the simplest arrangement to identify each single CCR, are three CCRs on a straight line with varying distances. The technique can also be used for a larger number of CCRs provided their true arrangement is known and at least two CCR can be identified. In the simulation/measurement one CCR is assumed to be in the origin while the position of the others momentarily remain unknown. The goal is to estimate a vector which points from the first CCR to a second one. Due to the mounting distances the area of a potential position of the second CCR is limited to a spherical surface around the first CCR. Based on the gathered residual differences and the observation vector the position can be further restricted. SLR range measurements yield the range difference between the CCRs in observation vector direction. Thus, a plane can be defined which is perpendicular to the observation vector and shifted by the range difference. The intersection of the sphere and the plane produces a circle of potential positions for the second CCR. Once simultaneous SLR data is available the two resulting circles, one from each station, can be intersected to produce two potential points in space. The two CCRs can now be connected with a surface vector, which can subsequently be used to reconstruct the attitude of this vector over time. The positions of the second CCRs over time produce a plane where the rotation axis is perpendicular to. Due to the two intersection points ambiguities accrue which can be eliminated by observing multiple passes or including a third SLR station. Within this work the theoretical limits of this method are investigated.
Preview