Document details
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
The overpopulation of resident space objects requires space surveillance and space traffic management initiatives. To this end, an efficient space objects cataloguing capability is needed and the main contribution is provided by ground-based sensors. In this context, survey radars can provide angular track, slant range and Doppler shift measurements, allowing both the orbit refinement of catalogued objects and the Initial Orbit Determination (IOD) of an uncatalogued one. In the latter case, a proper IOD technique is required to reconstruct the orbital state of the target and add it to the space objects catalogue.
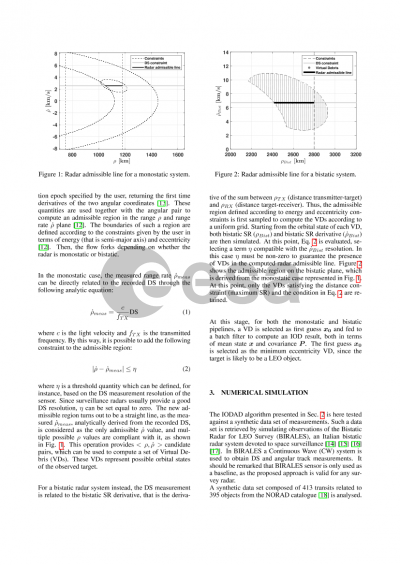
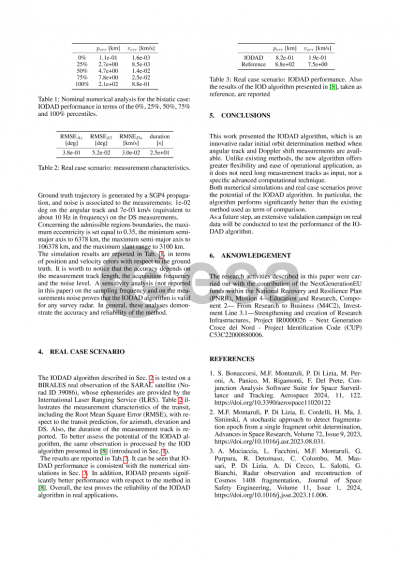
This paper describes a novel radar IOD algorithm when the slant range is not available, and therefore relies only on angular track and Doppler shift measurements. First, the angular track (usually expressed in azimuth and elevation) is converted to right ascension and declination, and the range rate is derived analytically from the Doppler shift measurement. Then, track compression is performed at a given epoch to derive the time derivative of the angular pair, and a monostatic optical admissible region (in the monostatic range vs monostatic range rate plane) is computed, considering semi-major axis, range and eccentricity constraints. The workflow then forks depending on whether the radar is monostatic or bistatic. In the former case, a monostatic radar admissible line is first identified from the intersection of the admissible region with the measured range rate and then sampled. Each sample provides a complete attributable set to compute a corresponding orbital state (the so-called virtual debris, VD), and orbital state candidates are thus identified. In the bistatic case instead, the monostatic optical admissible region is first sampled, and VDs are computed. For each VD, the bistatic range and the bistatic range rate are simulated. The bistatic optical admissible region is computed, and a bistatic radar admissible line is identified from the intersection with the measured bistatic range rate. The VDs compatible with such an admissible line are retained as potential orbital state candidates. For both the monostatic and bistatic radar cases, a first guess of the orbital state can be identified from the set of candidates based on specific considerations. For example, the VD with the smallest eccentricity can be selected considering that survey radars mainly detect LEO objects, whose orbits are quite circular. The orbital state first guess so identified is then refined through a batch filter and the IOD result is returned in terms of mean state and covariance.
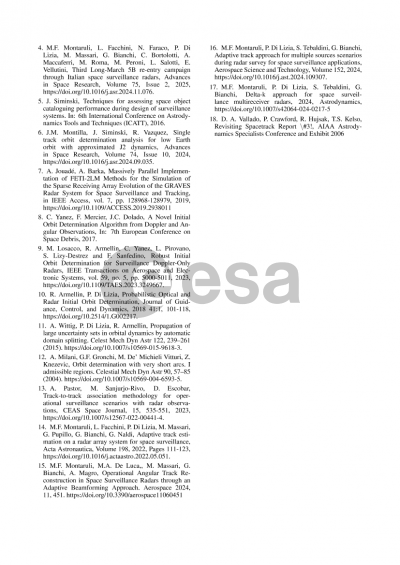
The algorithm is validated by both numerical simulations and real case scenarios. The accuracy depends on the measurement track length, the acquisition frequency and the noise level. These results prove that the proposed approach is valid for any survey radar. Unlike existing methods, the new algorithm offers greater flexibility and ease of operational application, as it does not require long measurement tracks as input, nor a specific advanced computational technique. For the former, a comparison with an existing method shows the significantly better performance of the new approach.
Preview