Document details
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
The growing number of Resident Space Objects (RSOs) poses a serious threat to the safety of satellites and the long-term sustainability of space activities. The current knowledge of the RSOs is mainly based on ground-based instruments including telescopes, radar and laser systems. To augment sensor networks capabilities and to go beyond some limitations of terrestrial systems, several satellites for space-based observations have been launched in the last decades. Indeed, space-based sensors offer unique advantages with respect to the ground-based counterparts, enabling more frequent and clear observations of RSOs, overcoming visibility limitations due to geographical constraints and avoiding issues related to local weather conditions and environmental and atmospheric effects.
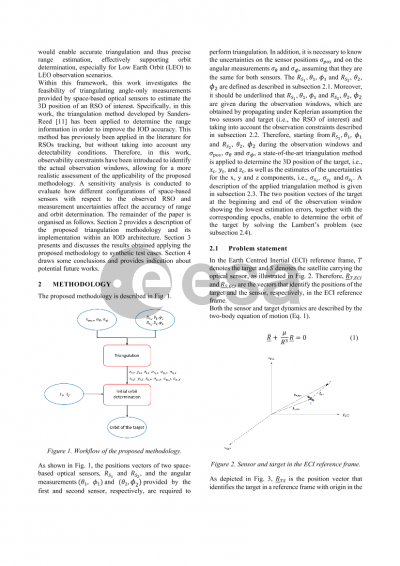
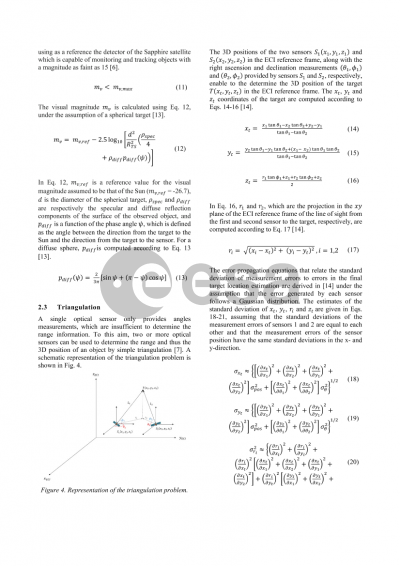
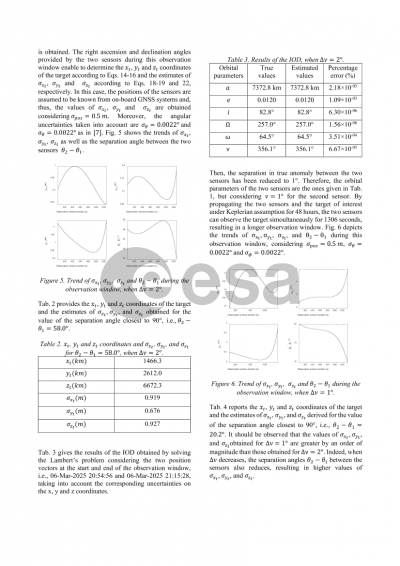
Optical sensors are the preferred technology for space-based RSOs monitoring, due to their small size and lower power requirements compared to radar and laser systems. However, unlike radar and laser systems, a single optical sensor only provides angular measurements, without the possibility of measuring the range from the object. Indeed, simultaneous measurements provided by two or more optical sensors can be used to determine the range and, thus, the 3D position of space debris by means of triangulation methods.
As an example, the obtained range information enables to improve the accuracy of the initial orbit determination (IOD), which is of paramount importance for space debris cataloguing. Indeed, when dealing with space-based observations, the results of the angles-only IOD generally have large errors, as the observed arcs are too short and lack range information. Therefore, based on triangulation with two optical sensors, the angles-only IOD problem can be converted to IOD using 3D position data, thus significantly improving IOD accuracy.
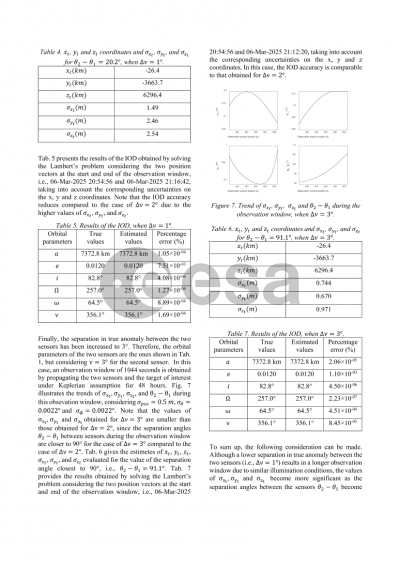
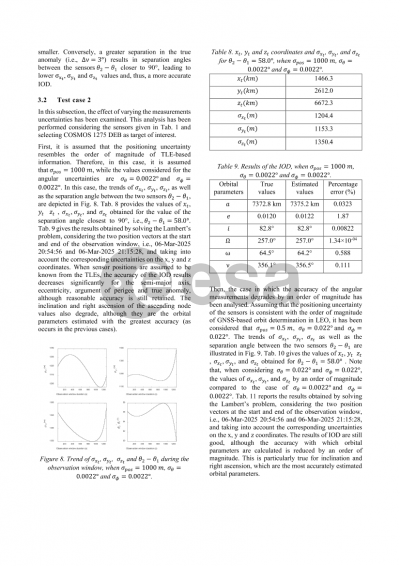
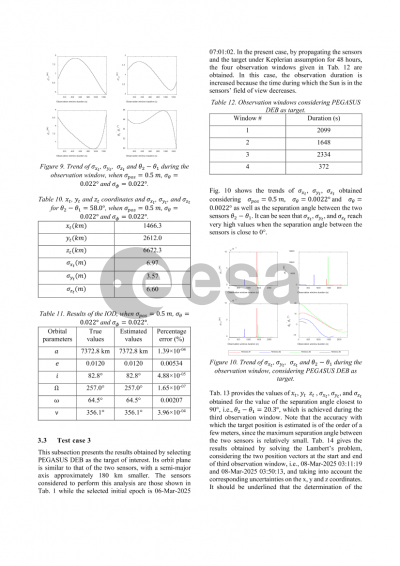
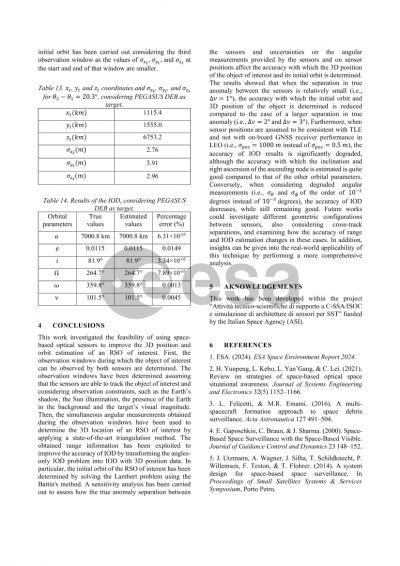
While this methodology is well assessed in the literature for ground-based sensors [1], this paper addresses the problem considering space-based sensors. The envisaged scenario concerns the exploitation of distributed systems for space-based space surveillance. Basic observation constraints and operational aspects, such as sensor tasking and data association, are addressed. Simultaneous angles-only measurements provided by different space-based optical sensors are used to support IOD using approaches that exploit knowledge of position vectors. A sensitivity analysis is conducted to evaluate how the different configurations of the space-based sensors with respect to the observed RSO, and the non idealities of the measurement process, affect the accuracy of range and orbit determination. The analysis is conducted on simulated test cases exploiting realistic orbit propagation and measurement simulation (including RSO detectability).
[1] Chen, L., Liu, C., Li, Z., & Kang, Z. (2021). A New Triangulation Algorithm for Positioning Space Debris. Remote Sensing, 13(23), 4878.
Preview