Document details
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
With the advent of mega constellations of thousands of satellites and the ever-growing risk of collision with a space object or debris, current ground-based practices of orbit maintenance and collision avoidance management may no longer be viable. Moreover, additional operational challenges arise when considering non-collaborative objects like inactive satellites or debris.
This paper presents preliminary results from GMV’s ongoing work in on-board Collision Avoidance (CA) technology and operations. It begins with an overview of two current ESA-funded CA projects – Advanced Control Techniques for Increased On-board Autonomy (ACTIVA) and the On-board Autonomous Collision Avoidance Detection Testbed (OCAD) – highlighting their key contributions. Briefly, ACTIVA focuses on implementing advanced CA methods for risk assessment and Collision Avoidance Manoeuvring (CAM) design, while also integrating these CA methods with a representative Attitude and Orbit Control System (AOCS) to close the collision avoidance loop. In turn, OCAD focuses on developing a standalone satellite payload capable of performing the beforementioned task, as well as active onboard sensing of debris and inter-satellite link communication to support coordinated manoeuvres. In both ACTIVA and OCAD, GMV’s extensive heritage and experience from previous ESA CA-related activities (namely the Collision Risk Estimation and Mitigation programme – CREAM-01, -02 and -03) was considered as a starting baseline.
In addition to previous heritage, ACTIVA and OCAD include an extensive review of various representative use cases, spanning LEO, MEO, and GEO orbital regimes. Moreover, a survey of applicable onboard advanced autonomy & control techniques, along with applicable onboard sensing and communications technologies is also performed.
Specifically, this paper proposes a comprehensive system architecture that integrates and encompasses the contributions of ACTIVA and OCAD, as well as GMV’s extensive heritage. The architecture is presented in detail as a modular and scalable Collision Avoidance System (CAS), which is applicable to the following mission scenarios:
- Conjunction with a debris / uncollaborative secondary (both uploaded from ground or detected onboard)
- Conjunction with a collaborative secondary (sharing orbital data and covariance)
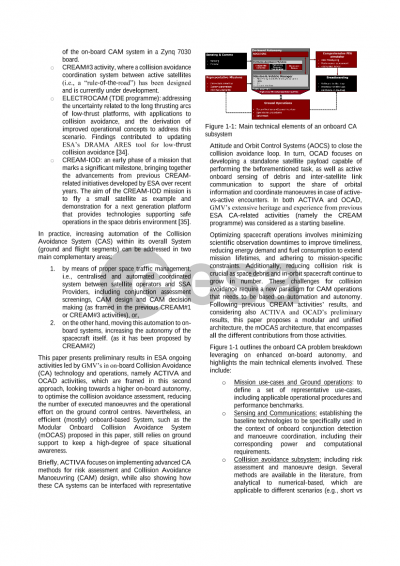
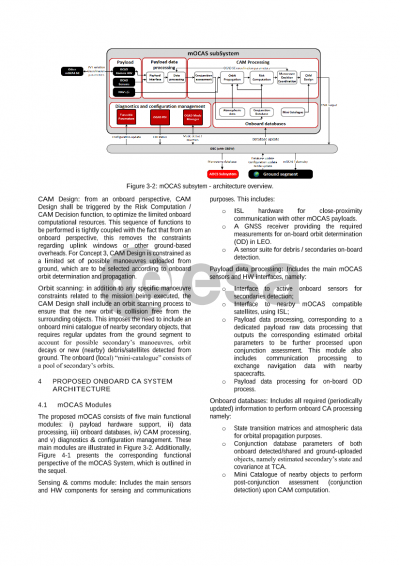
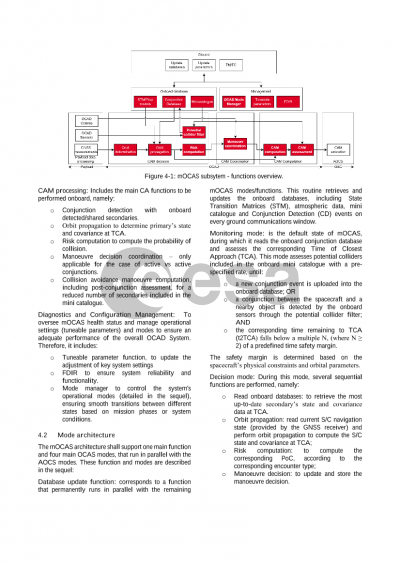
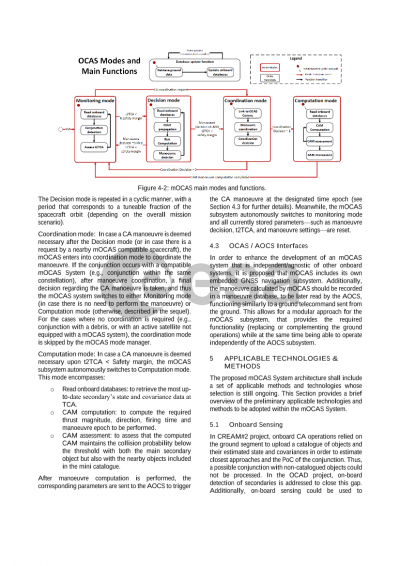
The proposed System architecture detailed in this paper includes an Onboard Collision Avoidance Subsystem (OCAS) that interfaces with the onboard computer to share telemetry data with the ground segment and guidance commands with the AOCS. The OCAS is composed of five main modules, namely: i) Payload HW support: Includes the main sensors and HW components for sensing and communications purposes; ii) Payload data processing: interfacing with CA onboard sensors and hardware, linking with nearby compatible satellites via inter-satellite links (ISL), and performing conjunction assessments for detected nearby secondary objects; iii) Onboard databases: store updated data essential for CA processing, including orbital propagation data, conjunction parameters for detected and uploaded objects, and a mini-catalogue for post-conjunction assessment; iv) CAM processing: includes the main CA functions, namely onboard orbit propagation, collision risk assessment, manoeuvre coordination for active satellites, and computation of collision avoidance manoeuvres with post-conjunction assessment; v) Diagnostics and Configuration Management: involves monitoring OCAS health, adjusting operational settings, and managing system modes for optimal performance.
Finally, the main contributions of this paper are as follows: i) a comprehensive modular and scalable System architecture which supports both ground and onboard detection; ii) support of advanced control techniques for both high and low-thrust use-cases, along with the different conjunction encounter types (both short and long-term encounters) and iii) a closed loop CA simulation, including an interface between OCAS and AOCS subsystems. These preliminary results underscore the potential of the modular CAS to enhance satellite autonomy and ensure sustainable orbital operations.
Preview