Document details
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
Electrodynamic tethers (EDTs) are emerging as a promising technology for space debris mitigation and orbital maneuvering, offering a propellant-free solution to address the growing challenge of maintaining safe and sustainable orbits. For scenarios requiring very high performance, a spinning EDT configuration can be a better option than an EDT aligned with the local vertical. Firstly, by selecting the right angle between the tether spinning plane and the orbital plane, a favorable orientation with respect to the geomagnetic field can be achieved to maximize the Lorentz force. Secondly, the dynamic instability of EDTs aligned with the local vertical, which is due to pumping of the energy by the Lorentz force [1], is avoided by spinning EDTs. The ElectroDynamic Debris Eliminator is an example of a spinning EDT aimed at low-cost space debris removal for Low Earth Orbit [2]. The guidance and control of spinning EDTs has previously been studied by assuming that the tether spinning plane coincides with the orbital plane [3].
This work expands our current knowledge on the guidance and electrical current control problem of spinning EDTs by considering the case of an EDT with only one electron emitter for cathodic contact and spinning in a plane that is tilted with respect to the orbital plane. The goal is maximizing the EDT's ability to change the orbit semi-major axis, eccentricity and inclination, thereby enhancing its capability for in-orbit servicing and space debris mitigation. By using Gauss' variational equations of orbital parameters and assuming a straight and rigid EDT spinning at a prescribed angular velocity, a simple dynamic model is constructed. The model, which considers the Lorentz force on the tether as the only perturbation and assumes that the EDT has only one electron emitter, is valid for any orbit and uses a magnetic dipole model with a tilt angle βm. Two types of analysis are carried out to investigate the navigation and control problem.
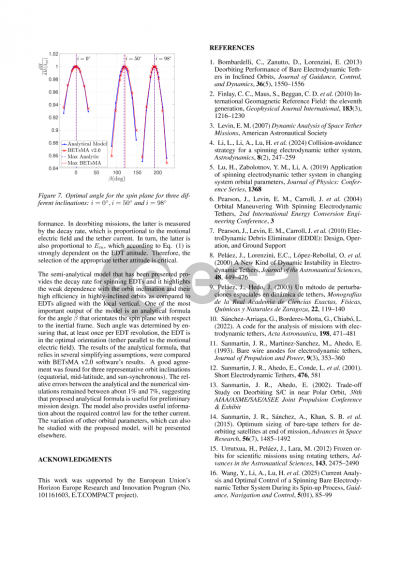
The first analysis is restricted to orbits of small eccentricity and takes βm = 0. The resulting variational equations are averaged over an orbital period by assuming that the orbital parameters remain constant during one orbit revolution. This approach yields useful analytic expressions to understand the relationships between tether orientation, current law, and the induced changes in the orbital dynamics. Optimal orientations of the EDT' spinning plane and electric current are investigated and found as a function of the mission objective, which is maximizing the variation of a specific orbital element. The second analysis considers non-zero eccentricity orbits and βm not 0. It is based on a more comprehensive numerical analysis to capture the full complexity of the problem. The results of the analysis show the propulsive performance of a spinning EDT as a function of the tether length, the average current, and the considered scenario (orbit and mission objectives). This study contributes to advancing EDT technology for sustainable space operations, providing insights into optimizing tether configurations and offering a viable approach for mitigating the risks associated with space debris.
[1] PELAEZ, Jesus; LORENZINI, Enrico; LOPEZ-REBOLLAL, O.; RUIZ, M. A New Kind of Dynamic Instability in Electrodynamic Tethers. Journal of the Astronautical Sciences. 2000, vol. 48. Available from doi: 10.1007/BF03546266.
[2] PEARSON, Jerome; LEVIN, Eugene; OLDSON, John; CARROLL, Joseph. ElectroDynamic Debris Eliminator (EDDE): Design, Operation, and Ground Support. 2010, p. 11.
[3] Simple Approach to Orbital Control Using Spinning Electrodynamic Tethers. Journal of Spacecraft and Rockets. 2006, vol. 43, no. 1, pp. 253–256. Available from doi: 10.2514/1.17519.
Preview