Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
In the near future, it is estimated that space objects (active satellites and debris) catalogues will contain of the order of hundreds of thousands of tracked objects. Therefore, new challenges arise in the development of algorithms that will perform the maintenance of these catalogues. Catalogue maintenance implies keeping the orbital information of the objects that are inside the catalogue within a certain level of reliability – i.e., limiting the associated uncertainty below a certain upper bound. To achieve that, objects need to be observed on a regular basis; however, currently the number of objects to observe is considerably higher than the number of sensors available, which results in a task overload of the latter. Thus, an optimal sensor scheduling strategy shall be able to select the objects to observe in order to maximize the overall coverage and obtain as much relevant information as possible, avoiding task redundancies. Theoretically, this can be achieved by taking into account all the possible object-sensor combinations for the complete desired observation time window in order to allocate the best observation task to each object. Such a computationally expensive scheduling tool requires centralized systems to manage a diverse network of sensors that may not have enough resources locally for such computations (e.g. ground sensors in remote areas or eclipse/latency periods and data rate limits for space-based sensors).
This work addresses to the necessity of moving the scheduling ability from a centralized system to a local (on-board) processing framework within the sensor in order to enhance its autonomy. Within Airbus Defence and Space a tool has been created to reduce the computational load for observation scheduling and to provide support for a future real-time scheduler. In fact, the proposed baseline does not try to allocate all the sensor tasks beforehand for the full observation period (e.g. one entire night). It evolves in a myopic state-space way, simulating just the imminent observing scenario and together with the previously collected information performs an optimization of the next task to execute, eventually to converge to an optimal coverage condition of the objects. The advantage of this approach is that it can be adopted for real-time decision-making strategies that, based on past and currently obtained measurements, may change the plan execution, compromising the forecasted optimality of a plan obtained completely offline.
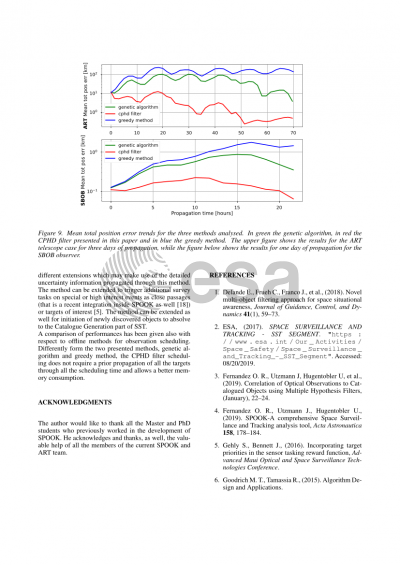
The proposed baseline makes use of a modern Cardinalized-Probability Hypothesis Density (CPHD) filter for internal prediction and update of the first two statistical moments of a pool of objects represented by a Gaussian Mixture. The proposed work summarizes the implementation of the scheduler within the orbit propagation and determination tool SPOOK (Special Perturbations Orbit determination and Orbit analysis toolKit), which is developed at Airbus Defence and Space. Next, this paper analyses the results and comments the possible future developments for the tool. Finally, a comparison with state of the art scheduling optimization algorithms, from simple greedy-methods to the heuristic genetic algorithms is presented.
Preview