Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
The Geostationary Earth Orbit (GEO) is becoming increasingly populated with both active and retired satellites due to the unique and valuable properties of geosynchronous orbits. Active Debris Removal (ADR) methods are necessary to reduce the number of objects in the geosynchronous belt by relocating dysfunctional satellites to a graveyard orbit several hundred kilometers above GEO. A number of ADR concepts have been investigated. However, most of them involve some sort of physical contact between the servicing satellite and the debris object. Retired satellites may tumble at rates of several degrees per second, exceeding the capabilities of certain grappling methods. Thus, touchless ADR techniques provide a great benefit for space debris removal.
The Electrostatic Tractor (ET) has been proposed to touchlessly remove space debris from GEO by taking advantage of inter-craft Coulomb forces. A controlled spacecraft (tug) emits an electron beam onto an uncooperative or retired satellite (debris). Thus, the tug raises its own electric potential to 10’s of kilovolts, while the debris charges negatively. Using inertial thrusters, the resulting attractive Coulomb force is utilized to relocate the debris to a graveyard orbit without any physical contact. It has been demonstrated that this concept can be used to raise the altitude of a retired satellite by 300km within two months, and that it is also possible to touchlessly detumble such satellites.
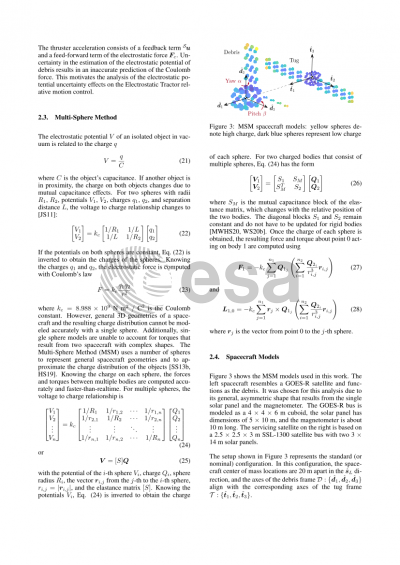
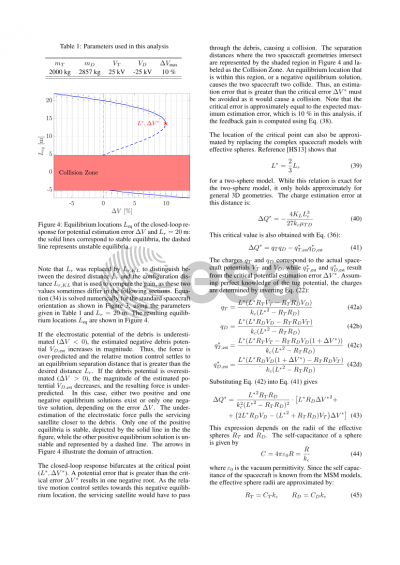
Prior research investigated the charged relative motion dynamics and control of the ET for two spherical spacecraft, and how charge uncertainty affects the control stability. If the charge uncertainty exceeds a critical value, the closed-loop relative motion control bifurcates and causes the two spacecraft to collide. However, given the symmetric shape and charge distribution of a single sphere, attitude effects were not studied in prior work. The Multi Sphere Method (MSM), which uses several spheres to represent complex shapes, approximates electrostatic forces between charged bodies with little computational effort. This enables the consideration of complex spacecraft shapes and the resulting torques for research on charged astrodynamics.
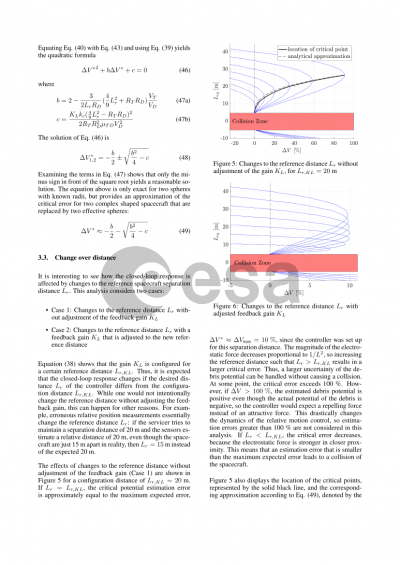
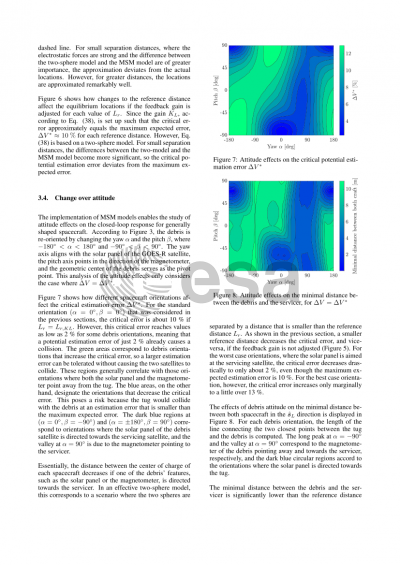
The final paper will advance the charged relative motion control of the Electrostatic Tractor by implementing MSM for complex spacecraft models with general three-dimensional shapes. This allows this study to explore how the relative attitude impacts the closed loop stability for a range of charge uncertainty. Additionally, electric potential uncertainty will be considered instead of charge uncertainty. An emphasis is given on how different debris orientations influence the impact of electric potential uncertainty. Preliminary research has shown that certain debris attitudes can drastically reduce the critical value of electric potential uncertainty at which the relative motion control bifurcates and the two spacecraft collide. This poses a problem and requires the adjustment of the feedback gain selection process to guarantee control stability. Moreover, the effect of electric potential measurement uncertainty on the equilibrium separation distance between the servicer and debris will be studied for different debris orientations. The final manuscript will include analytical analysis as well as numerical simulations.
Preview