Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
Space debris is an exponential-growth problem that must be dealt with before it impedes our access to space. This work explores the technical and economic feasibility of removing space debris using a net and tether system. Of the many techniques for removing debris available, this work considers using a chaser spacecraft with an Active Debris Removal System (ADRS). The chaser spacecraft performs a rendezvous with the debris, visually inspects the debris, captures it with a net, and stabilizes and deorbits the system using a tether. This work considers the mission design, a preliminary design of the ADRS, and an economic study of such a space debris removal strategy.
The mission design highlights the most important debris to remove and the ADRS requirements needed to enable removal of that class of debris. It covers the high-level requirements such as: debris size and debris angular momentum, which drive the capture method requirements, expected orbits of the debris most important to capture, which drives the altitude changing system, and mission profile, which drives all systems including the vision system.
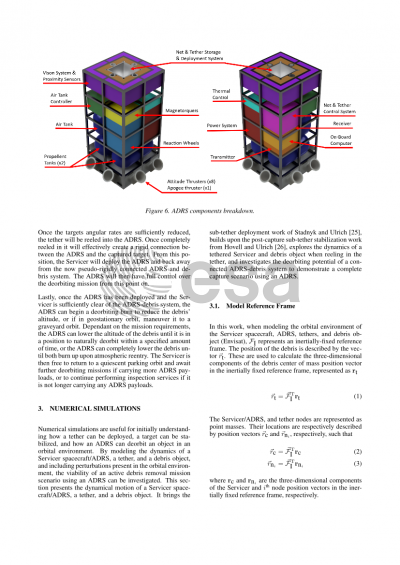
The ADRS payload includes a net, a tether, a net deployment system, a vision system, and an altitude changing system. Numerical simulations of net and tether deployment and debris capture are presented, which build upon previous work [1,2]. The previous work considers the dynamics of pre-captured debris using sub-tethers [1], or establishes the tethered connection using harpoons [2]. In contrast, this work studies the establishment of a sub-tethered net system. Results of these numerical simulations guide the ADRS payload design. Vision systems and altitude changing systems are surveyed, and recommendations are given to satisfy the mission design goals presented above. A preliminary design of an ADRS is finally presented.
The economic study includes insights learned from discussions with potential customers regarding the commercial demand for a debris removal system, a costing for a demonstrator mission and estimates of debris removal costs, a study of the current space debris removal policies, and recommendations for future policy exploration. The commercial viability of a debris removal system is often overlooked, and is likely too large a task for the world’s space agencies to fund indefinitely. With proper policies in place, the potential for a thriving commercial sector is explored.
The major achievements from this paper are: 1) Numerical simulations using a sub-tethered system combined with a net for debris capture; 2) A preliminary design of an Active Debris Removal System payload; and 3) An economic study of the present space debris removal market with recommendation on future policy directions.
We acknowledge the support of the Canadian Space Agency (CSA) [20STDPM01].
[1] Hovell, K., and Ulrich, S., “Postcapture Dynamics and Experimental Validation of Subtethered Space Debris,” AIAA Journal of Guidance, Control, and Dynamics, Vol. 41, No. 2, 2018, pp. 519-525.
[2] Stadnyk K., and Ulrich, S., “Validating the Deployment of a Novel Tether Design for Orbital Debris Removal,” AIAA Journal of Spacecraft and Rockets. accepted
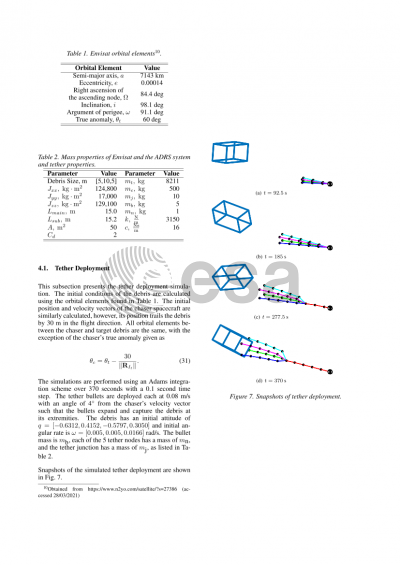
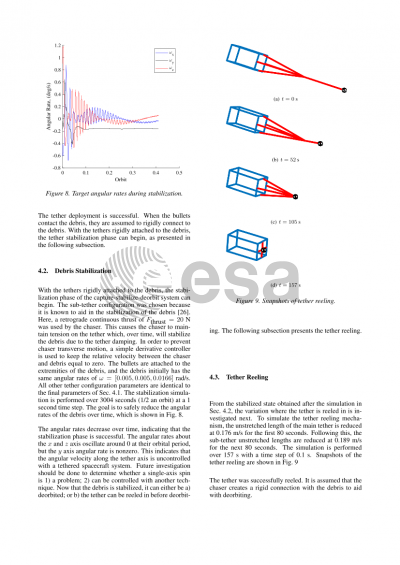
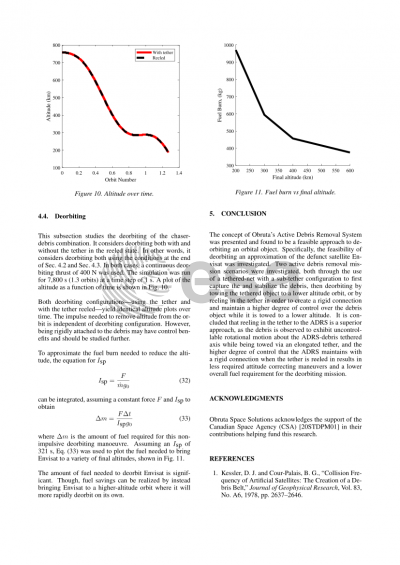
Preview