Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
In recent years, the growing number of objects in space pose serious collision hazard to operational satellites. Hence, space situational awareness towards collision risk mitigation is an important responsibility of all space faring nations for preserving the sustainability of space environment. Execution of Collision Avoidance Manoeuvre (CAM) is the mitigation method adopted towards protecting the operational satellite from catastrophic mission failure, and also to avoid creation of new debris, which may further lead to further cascading collisions.
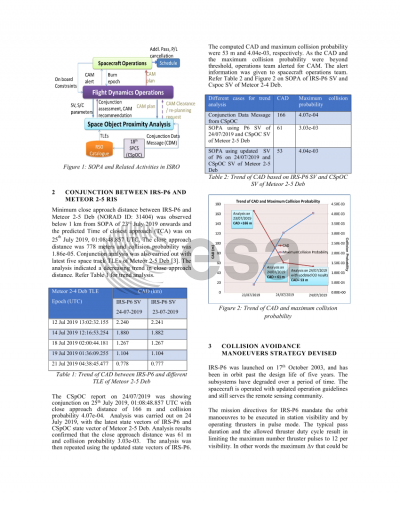
ISRO is currently operating a fleet of Low-Earth-Orbit (LEO) satellites for various applications like remote sensing, weather forecasting, oceanography, scientific applications etc. Space Object Proximity Analysis with Resident Space Objects is carried out for all operational satellites to assess close approach risk with other space objects. Critical conjunctions with less than 1 km miss distance are closely monitored, and a CAM is planned to avoid collision as and when necessary. This paper presents the collision avoidance methodology adopted for ISRO’s LEO satellites with constraint on maximum firing duration, with a typical CAM design for one long served satellite with more than 15 years of orbital life.
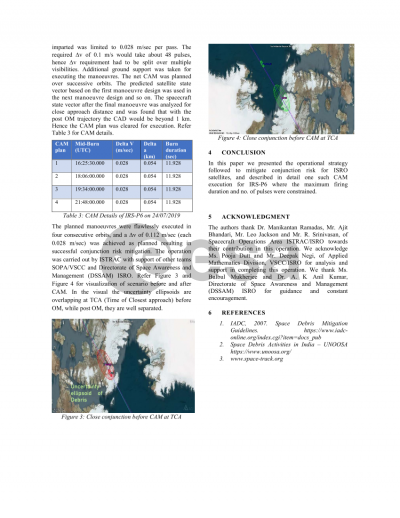
Due to ageing related on-board degradation, the satellites are operated with a on-board constraints. A close conjunction was predicted between one such satellite and Meteor Debris on 25th July 2019. On 23rd July the predicted miss distance between two objects was 61 m and the collision probability was 3.03e-03. On next day, the close approach distance was found to be 53 m with a collision probability of 4.04e-003.
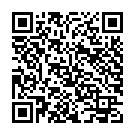
Considering the trend of decreasing close approach distance and increasing collision probability, it was decided to conduct collision avoidance manoeuvre immediately. Normally orbit manoeuvres are done in pulse mode for the old satellites and maximum number of pulses is limited, with change in velocity of 0.028 m/sec. Since a minimum change of 0.1 m/s velocity was required to increase the minimum close approach distance beyond 100 meters at the conjunction epoch, four manoeuvres were planned in consecutive orbits successively and achieved the intended velocity. The CAM plan was subject to conjunction analysis to ensure that post manoeuvre orbit is free of any other conjunctions. The CAM was successfully executed in four different passes well before the predicted time of conjunction, the cumulative delta-v of 0.112 m/sec. The various challenges in the CAM design and remedial solutions has been addressed in the paper.
Preview