Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
Context
In the era of LEO mega-constellations Earth nearest orbits are getting more populated with operational and non-operational spacecraft every year. This will dramatically increase the risk of collisions with consequent further creation of debris. 10 % of failed satellites have been estimated within large constellations, 10% that will not be able to deorbit themselves autonomously.
Active Debris Removal is focused on capturing and removing spacecraft that have reached their end-of-life and are unable to perform the disposal burns. An example of such mission objective is to remove a mega constellation satellite from the operational region and perform an uncontrolled re-entry of it. The mission consists of navigation to the non-cooperative target, capturing of the prepared or unprepared interface, detumbling, lowering the orbit of the satellite and detaching[1].
EROSS and EROSS+ projects
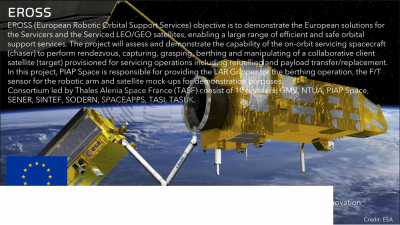
EROSS (European Robotic Orbital Support Services) and EROSS+ are subsequent Horizon 2020 projects (Operational Grant (OG) 7 and 12) that focus on development and integration of technologies enabling first European the In-Orbit Servicing mission.
EROSS Project both boosts the maturity of major technologies of fast and practical deployment of the developed solutions in space and increase their functionalities and performance. The project also delivers input information for the assessment of servicing tasks for non-collaborative orbital targets.
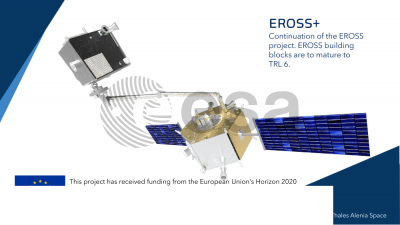
EROSS + project will focus on final maturation of necessary technologies for TRL6 and mission design. It is planned to cover Mission schedule up to B1 phase.
In the long term, besides institutional exploration programs, advanced robotic servicing may also be required by commercial enterprises for construction of On-Orbit Factories and infrastructures for space tourism, and also for Asteroids exploitation. In this area, PIAP Space is also developing a robotic arm for orbital missions under the TITAN project under ESA funding. This whole range of development of robotic solutions conducted by PIAP Space creates a synergy effect.
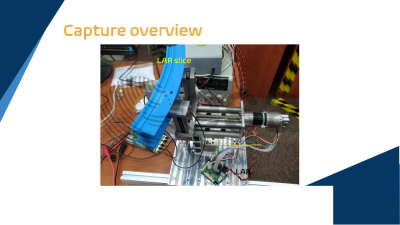
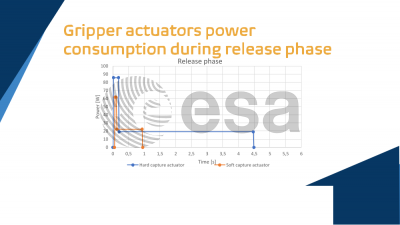
LAR Gripper
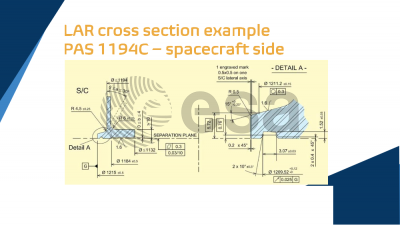
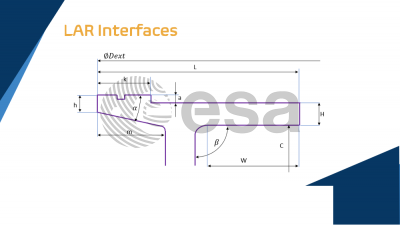
The appendage to be used for grasping by the robotic arm’s end-effector is the Client spacecraft Launch Adapter Ring (LAR). Indeed this approach even if more demanding for the Servicer’s end-effector robotic part, relaxes the design and accommodation constraints (and consequently the cost) on the Client side.
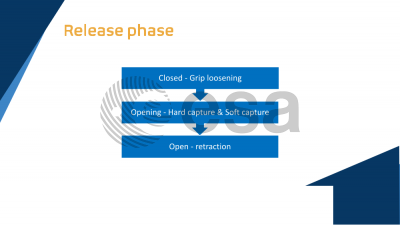
The main functionality of the LAR Gripper is to grasp the LAR of the Client satellite during capture and berthing operation, secure it during following detumbling, docking manoeuvres and further servicing operations.
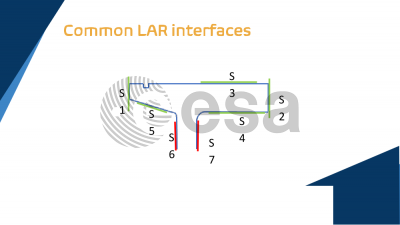
Key design drivers for the LAR Gripper development are: compatibility with different LAR models, ability to transfer loads, short capture time and high capture envelope for required flexibility and positioning inaccuracy.
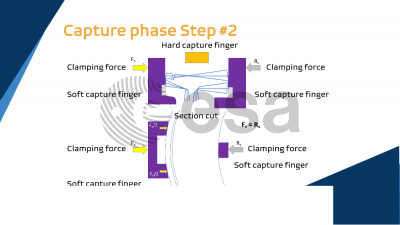
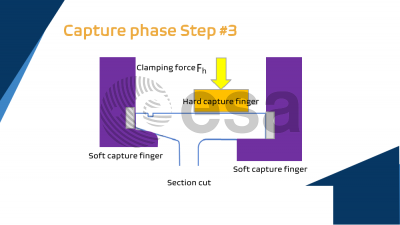
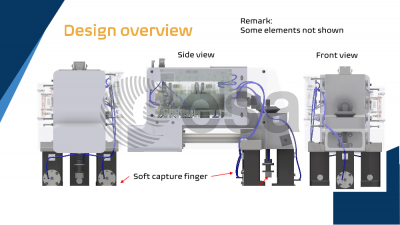
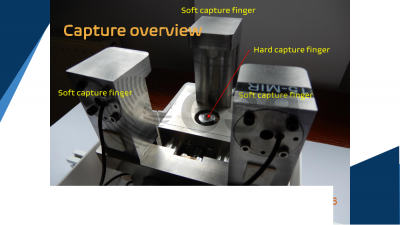
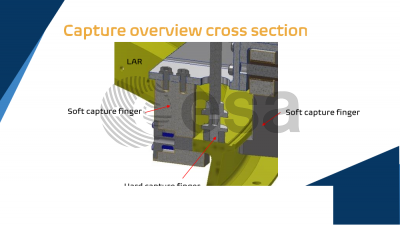
The LAR Gripper consists of motorized articulated finger designed to grasp the satellite’s LAR profile rigidly. The movement of the motor and fingers is controlled by a built-in microcontroller and motor driver. The LAR Gripper design includes Force/Torque sensor to provide force feedback for the servicer satellite OBC and Tactile sensor measuring the clamping force.
Preview