Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
The ESA-funded BIOINSPACED (BIOINspired solutions for SPACE Debris removal) project intends to find biomimetic solutions for novel technologies that can contribute to ESA’s Clean space initiative by mitigating space debris, especially in the Low Earth Orbit (LEO). Analysing existing biomimetic examples and screening nature’s idea pool helps defining new bio-inspired solutions that fulfil the technical requirements related to an active debris removal (ADR) mission.
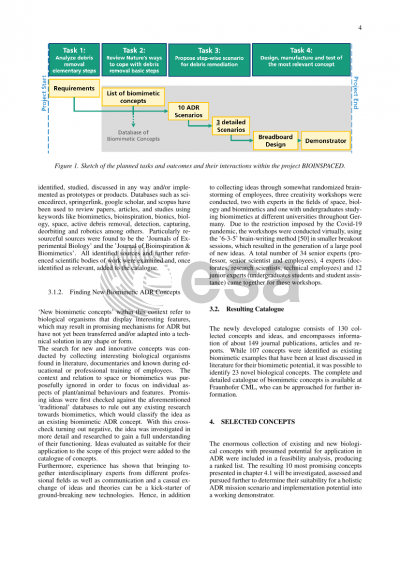
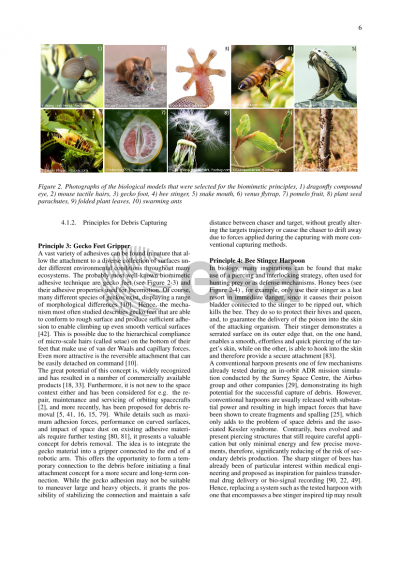
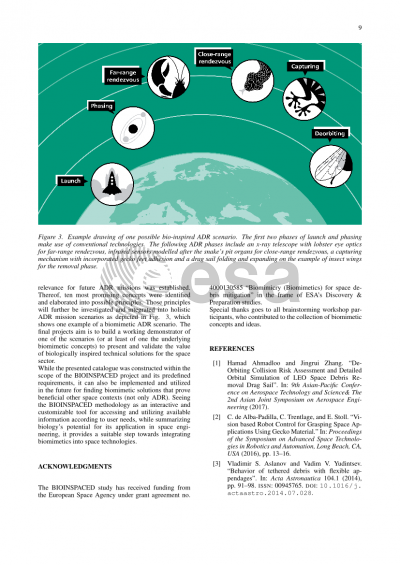
In the initial project stage, the elemental steps of debris removal scenarios and the associated requirements were reviewed and technical challenges for biomimetic innovations were identified. Out of the main elemental steps launch, such as phasing, far and close-range rendezvous, as well as mating and de-orbiting, this study will focus on natural inspired effects for mating and capturing. From the identified requirements, an extensive literature and brainstorming search is carried out in a two-stage approach: Firstly, the transferability of existing biomimetic applications from the fields of robotics, materials science, kinematics, mechanics and the space technology into prospective ADR solution is studied. Subsequently, a biomimetic analysis will perform a screening of nature to develop potential new solution concepts, this will likely include solutions that represent strong challenges for “traditional engineering”. Besides the already prominent biomimetic ADR concepts, such as micropatterned dry adhesion mechanisms of spider legs or gecko feet, potential natural aspired effects are thigmotropism, the formation of roots, or the closure mechanism of Venus flytraps, octopus inspired continuum robot arms, insect joint inspired grippers, and many more.
This paper will expand the current state of the art of ADR by presenting an initial catalogue of identified bioinspired solutions to ADR and developing a trade-off analysis that cluster and rank the different concept for feasibility and applicability.
Based on the presented catalogue and ranking method, the projects next step is to design a simple demonstrator concept of the most promising BIOINSPACED solution and present the new concepts within ESA to harvest the biomimetic potential of such innovative solutions.
Preview