Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
The current space debris population and launch trends will pose a great challenge on the sustainability of the near-Earth environment for future missions. A great effort is ongoing within the space community, to define mitigation guidelines. Nonetheless, passive mitigation of the debris population is deemed not enough to ensure a stable near-Earth environment in the next few years. Active remediation methods for space debris removal are foreseen in the near and long future. The cost and complications of an Active Debris Removal (ADR) mission strongly drives the scientific community to create a meditated and clear priority list for the debris object to be removed to optimally benefit the space environment.
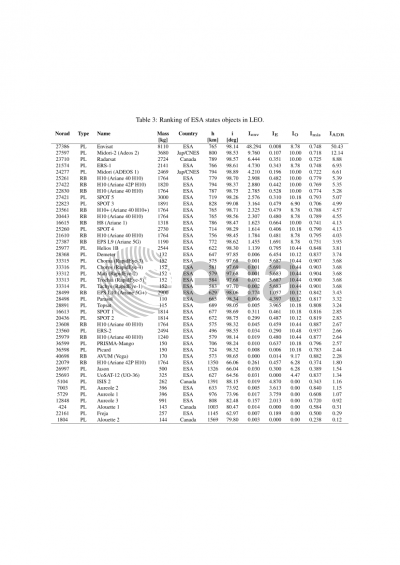
In the present work, a methodology for ranking Active Debris Removal (ADR) mission candidates will be presented and applied to the current space debris population. The ranking will be performed considering various indices that represent and quantify the difficulties and advantages of the removal of a particular artificial resident space object. The index will be composed by different sub-indices representing the effects from the environmental, economic, operational and mission point of views. The environmental index quantifies the severity of the debris objects in terms of for example its collision probability, its mass and the fragments creation due to a possible collision or explosion in space. MASTER-8 is used as a tool to evaluate the debris environment, while the semi-analytical propagator PlanODyn is used to estimate the objects orbit lifetime. The economic impact index is assessed considering the expected revenue of a certain orbital slots computed considering the current active satellite population, ranking the orbit slots as economic resource. The operability index newly introduced in this work is a quantitative evaluation of the difficulties and advantages of the servicing mission to an uncooperative and non-collaborative object. The latter includes sensors operability constraints (eclipse, field of view blinding), object’s attitude state, shape, and size characteristics. Finally, the mission index is defined, which evaluates the ADR mission properties in terms of multiple target mission possibility, total and ride share opportunities. The various indices contribution will be weighted to generate a well-balanced ranking of the space debris population.
In the present work, the framework for ranking target objects for removal is developed and described in depth. Nonetheless, the non-completeness of the data available for some cases (economic revenues, debris attitude states) will constrain the application of the full index to a limited population. The ranking developed is applied both to the present population scenario, and future scenarios. A practical application of the proposed work will be shown within the Task 1 of target selection for ADR missions within the ESA funded study “Preparation of Enabling Space Technologies and Building Blocks: GNC and robotic arm combined control” performed by the University of Padova, Politecnico di Milano and the University of Napoli.
Preview