Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
The increasing number of space objects and the congestion of the orbital debris environment makes satellite operation activities more challenging year after year. There are more than 500 operational satellites only in geostationary orbit, most of which perform manoeuvers every one or two weeks; while satellite mega-constellations, with manoeuvring capabilities, are gaining momentum in low altitude orbits. These orbit control manoeuvres have an impact on the provision of collision avoidance (CA) services, both due to the need to account for them to avoid false alerts or missed events, and also to use them, if possible, properly adapted in time or size, for collision avoidance purposes. Hence, detecting those manoeuvres and characterizing their frequency is crucial for CA service provision. Besides, for the robust and reliable provision of CA services, a challenging trade-off between detection time and manoeuvre characterization accuracy should be performed.
The automatic detection of manoeuvring objects can be framed within the general multi-target tracking-association problem, in which the tracked objects are allowed to manoeuvre. In this paper, we present a novel and operationally feasible approach to jointly tackle 1) track association and 2) manoeuvre detection and estimation problems. The rationale behind this is that few tracks are needed to detect a potential manoeuvre, but several of them are required to perform a reliable estimation of the manoeuvre and maintain the orbit accuracy after the manoeuvre. In this way, manoeuvre detection is tackled as an association problem between an orbit of the object, estimated before the manoeuvre, and a set of tracks, received after the manoeuvre. This approach allows to considerably reduce the manoeuvre detection time, since, as opposed to orbit-to-orbit association, a new object detection and initialization is not required. Additionally, apart from the manoeuvre detection, we propose a complementary strategy for manoeuvre frequency characterization, based on a statistical analysis of orbital differences, to perform the manoeuvre detection using only orbital data. This allows us to study the manoeuvre pattern of objects and identify typical manoeuvre strategies and frequencies.
Results obtained from sensor data for manoeuvre detection and estimation are presented in two application scenarios: 1) observations from optical sensor networks, 2) observations from radars. Depending on the scenario, real or simulated observations are used to showcase the use of the manoeuvre detection methodology based on observation data. In particular, in the optical case, real observations are used from the optical sensor network of the Spanish Space Surveillance and Tracking (S3T) system managed by Centro para el Desarrollo Tecnológico Industrial (CDTI). Clear manoeuvre detection performance metrics for different operational satellites are provided in terms of success rate and false positives and negatives rates, emphasizing on scalability and robust operational environments. The trade-off between detection time and characterization accuracy is discussed not only from the manoeuvre detection point of view, but considering the whole process, from the reception of new tracks to the update of orbital information. Regarding manoeuvre detection based on orbital data, results are shown based on the analysis of high fidelity ephemerides of an objects catalogue. This analysis has been used to characterise the typical frequencies of manoeuvres in different orbital regimes, as well as to determine whether a given object is manoeuvrable or not.
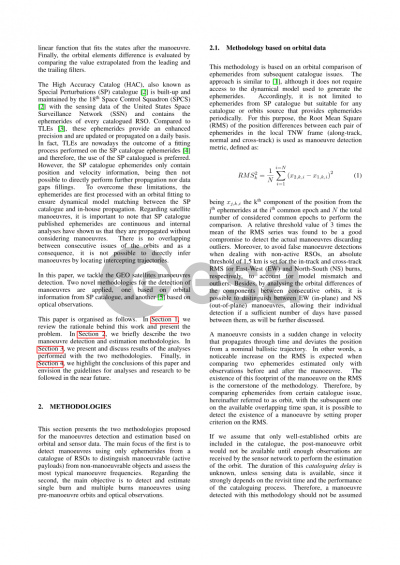
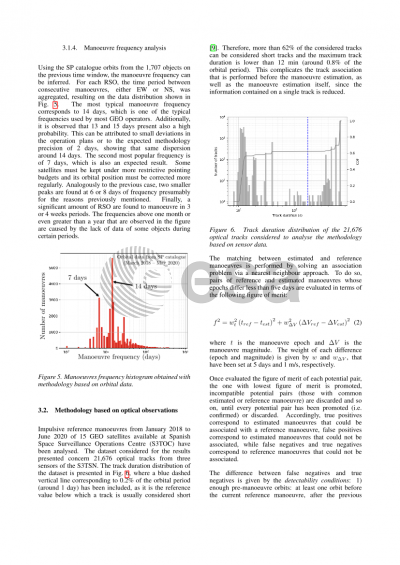
Preview