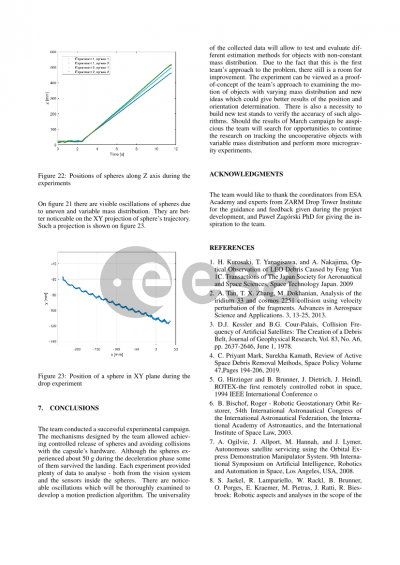
Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
A new approach to examining the motion of uncooperative objects is presented. The design of an experiment whose objective is to collect the data required for the evaluation of a motion prediction algorithm is described here, with an assumption that the uncooperative satellites may have variable mass distribution due to some sloshing fuel inside or flexible, oscillating parts such as solar panels. The data is going to be collected during an experimental campaign in ZARM Drop Tower as a part of the Drop Your Thesis 2020 programme organized by ESA Education Office. This facility provides a stable and precise(10-6m/s2) microgravity environment for about 9 seconds. The experimental campaign is taking place in March 2021.
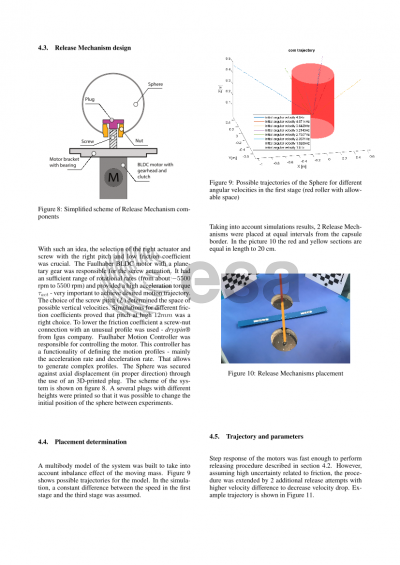
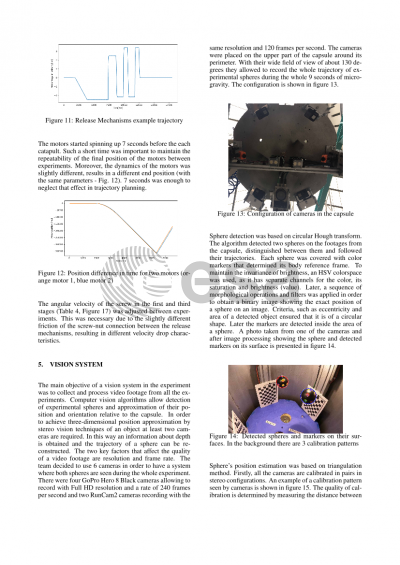
During the experiment, the motion of two free-floating spheres will be recorded with six high-speed cameras. The recordings are fed to a specially designed vision system, which extracts the position and orientation of each sphere based on visual markers, uniformly distributed on their surfaces. The markers determine the axes of the sphere's body reference frame. The assumption of non-constant mass distribution is realized by a mass-spring system inside the sphere. The displacement of a mass is measured with a distance sensor. This data combined with the position of the sphere and prior knowledge of the geometric-mass parameters allows computing the instantaneous center of mass, principal axes, and inertia tensor of the system. The spherical shape of the object minimizes the probability of collision with the greatest volume available. Choice of the shape of the object is a trade-off between the space available inside and the likelihood of a collision with the capsule. Also, a spherical shape minimizes the effect of aerodynamic drag on its motion. The spheres are 3D printed in SLA technology, which enables fast prototyping and high precision. They are released by a mechanism based on a screw-nut connection. The spheres are wound up on a screw, which is mounted on a BLDC motor. The process of releasing is done by firstly spinning up the motor about the direction of the thread, then stopping and spinning up the screw in the opposite direction, forcing the sphere to unscrew.
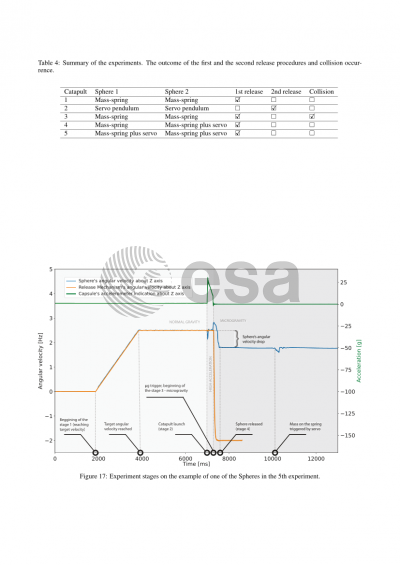
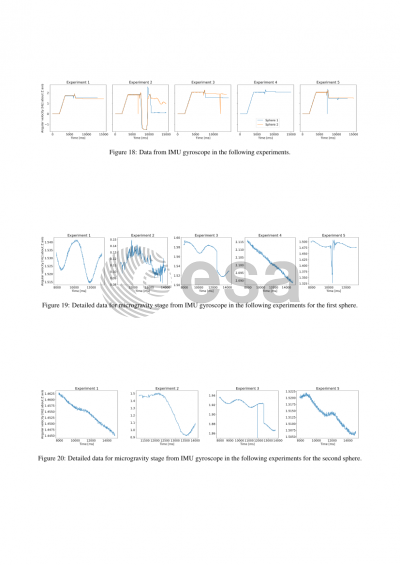
The team will present preliminary outcomes of processed experimental data such as real trajectories from the experiment, as well as results of the tests conducted prior to the experimental campaign that demonstrate the performance and eligibility for the experiment of developed subsystems.
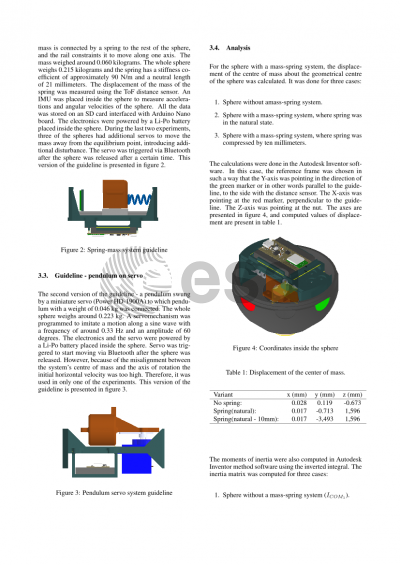
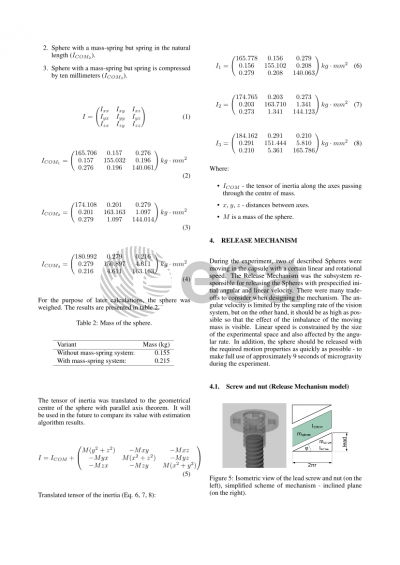
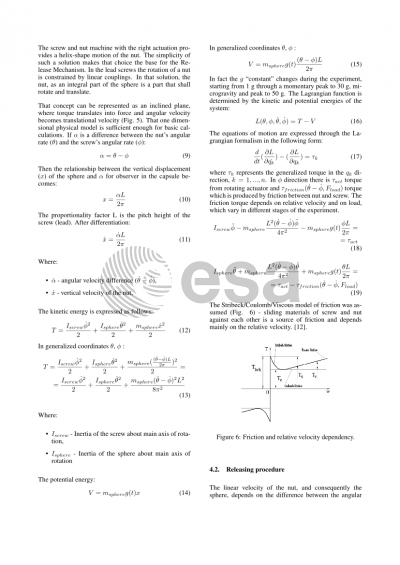
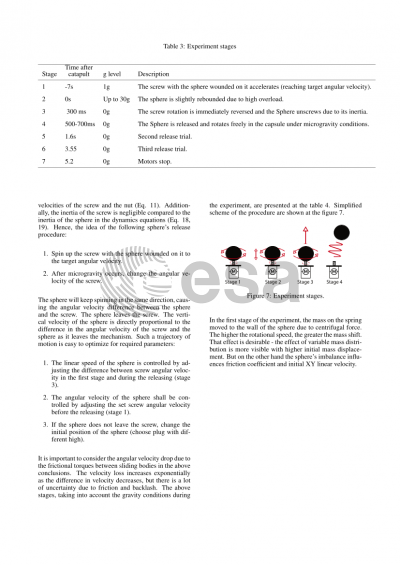
Preview