Document details
8
1
T. Flohrer, S. Lemmens, F. Schmitz
Abstract
Constantly increasing number of resident space objects creates the needs for a European centralized database for continuous space situation monitoring. Means to share data as much as possible are being put in place, also in the EU, through databases of sensor data. With the increase on the number of contributing sensors, an automated processing chain to ingest, pre-process, correlate, validate, process and share data, as well as sensor calibration in parallel, is mandatory.
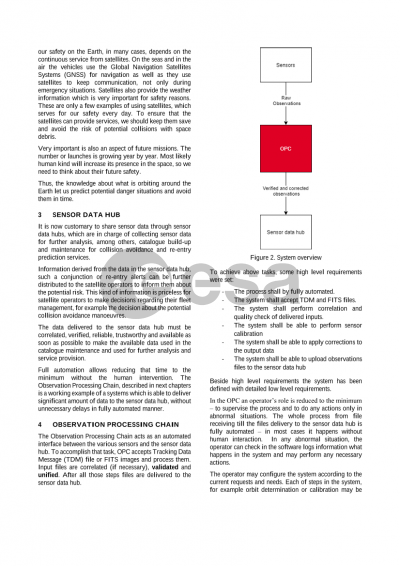
In this paper an automated data processing chain is presented. The main task of the automated chain is to gather the data from contributing sensors, to process it and to deliver it to the sharing sensor data hub, which makes them available for all interested users. The approach applied to develop the processing chain was to make it working with minimal to no involvement from the operator. The operator role is to supervise the process and react only in case of anomalies. The system is able to download in an autonomous manner all reference from different sources (catalogues, solar activity files, GNSS reference orbits, Earth Orientation Parameters, etc.) needed to perform all calculations.
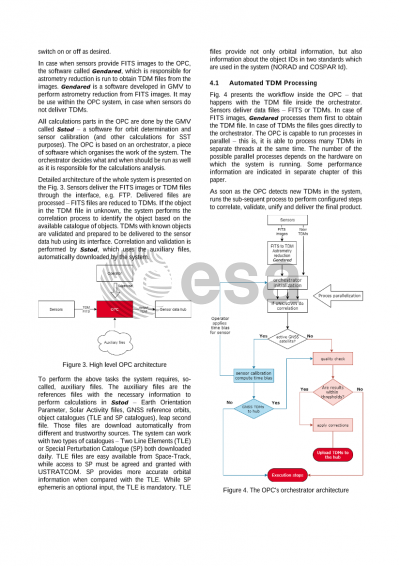
The system is ready to work with observations in TDM format that contain only a few measurements and an unknown object id, what is usually the case in the survey operations. When such observations arrive, the first step is find out which object was observed. To obtain that, a correlation process is run. This process checks the measurements against the orbits of known objects from the catalogue used for correlation purposes. The automated chain uses TLE or SP catalogues as references, depending on what is available. As soon as the measurements are matched with the known object the following pipeline is run. The next steps are also run in case that the observations contain data for already identified object (known NORAD ID) which is usually the case for tracking operations.
As soon as a TDM includes the NORAD ID, the system starts the sub-sequent process. Firstly it recognizes if the object is an active GNSS satellites, and depending on that, the sensor calibration or measurement quality check is run. Sensor calibration is run when an active GNSS object was observed, to obtain the time bias for sensor in real time. Quality check of measurements, based on the computation of residuals against known orbits from TLE or SP Catalogue, is run always, before the TDM is sent to sensor data sharing hub. When the residuals are higher than defined thresholds, the TDM is not sent. If the TDM file with measurements passes the quality criteria, the next step is to convert it to required format and apply the corresponding corrections if needed (annual or diurnal aberration, time bias correction, etc.). The automated processing chain also performs orbit determination with the observations of the objects being observed as an additional quality check of the observations.
The system is able to fully process one TDM file in less than 1.5 minute on average workstation machine (including correlation mode, which is the most time consuming). The software is able to run processes in parallel threads, number of possible threads depends on the number of available CPU cores on the machine, each thread is processing one TDM from the beginning till the end.
This paper will provide a description of the automated processing chain, will also provide statistics about the performances, both accuracy and run-time, correlation metrics, and will describe the main deployments of this software currently in use in Poland and Romania.
Preview