Document details
7
1
T. Flohrer, F. Schmitz
Abstract
The Fly Your Thesis! programme of the European Space Agency’s Education Office offers university students the opportunity to conduct their scientific experiments in microgravity conditions during a parabolic flight campaign. In this framework, the PoliTethers team, from Politecnico di Milano, Department of Aerospace Science and Technologies, was selected to fly an experiment on-board Novespace’s Zero-G aircraft in the 65th ESA Parabolic Flight Campaign in October/November 2016.
The SatLeash experiment investigated the dynamics and control of tow-tethers, for space transportation: towing objects in space through a tether has become a common concept for many missions such as active debris removal, satellite servicing and even asteroids retrieval. Space tugs (i.e. two orbiting objects, one passive and one active, connected by a flexible link, the motion of the system being excited by the active spacecraft thrusters) open new challenges for guidance and control design. The chaser is required to robustly perform de-orbiting operations while controlling a complex system, damping vibrations of flexible elements and connections, avoiding instability, collisions, and tether entanglement. One of the most common critical modes that may arise during towing operations is the bounce-back effects. Whenever thrust is shut down, the tether slackens and the residual tension accelerates the two objects towards each other, increasing the risk of collision. After this mode, the control recovery is difficult and not always possible. The tether may entangle on the target or the chaser itself leading to its breakage.
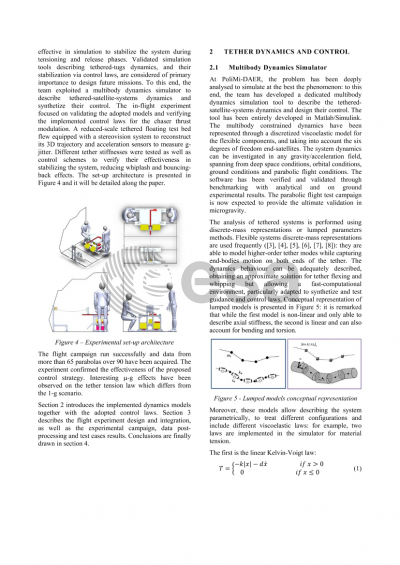
Control methods based on shaping the thrust profile through a wave-based controller, using tension feedback, proved to be effective in simulation to stabilize the system during tensioning and release phases. Validated simulation tools describing tethered-tugs dynamics, and their stabilization via control laws, are considered of primary importance to design future missions. To this end, the team exploited a multibody dynamics simulator to describe tethered-satellite-systems dynamics and synthetize their control. The in-flight experiment focused on validating the adopted models and verifying the implemented control laws. A reduced-scale tethered floating test bed flew equipped with a stereovision system to reconstruct its 3D trajectory and acceleration sensors to measure g-jitter. Different tether stiffnesses were tested as well as control schemes to verify their effectiveness in stabilizing the system, reducing whiplash and bouncing-back effects.
The flight campaign ran successfully and data from more than 65 parabolas over 90 have been acquired. The experiment confirmed the effectiveness of the proposed control strategy. Interesting ?-g effects have been observed on the tether tension law which differs from the 1-g scenario.
The paper briefly introduces firstly the models set up together with the adopted control law, gives the simulations’ rationale, describes the flight experiment design and integration, to secondly focus the attention on the experimental campaign data and data post-processing. The validation process is, then, explained and results are discussed.
Preview