Document details
7
1
T. Flohrer, F. Schmitz
Abstract
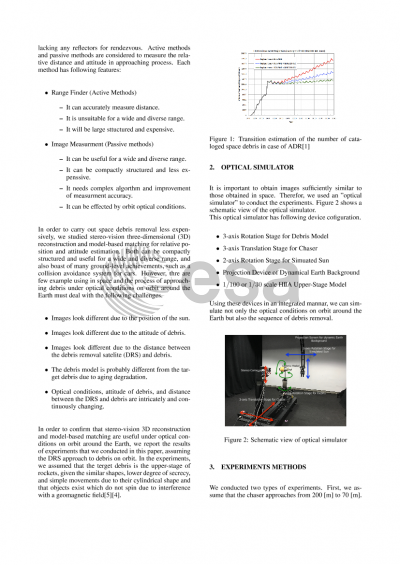
The amount of space debris on orbit around the Earth has been increasing because of their explosions or collisions. If the debris increases more in the future, it is feared that space development is difficult in the future, and so an active debris removal (ADR) is needed. In the process of removal, a debris removal satellite has to approach to the space debris that is a non-cooperative target and, the technology to measure relative position and attitude between the debris removal satellite and the space debris is essential. We study stereo-vision three-dimensional (3D) reconstruction and model-based matching for relative position and attitude estimation, because it can be compactly structured and useful for a long and wide range. In our stereo-vision system, characteristic points are extracted from two cameras images, and correspondent points are searched. Then, these points are reconstructed to 3D and cylinder model is applied the 3D point cloud. On this applied cylinder model, the relative distance and attitude is estimated.
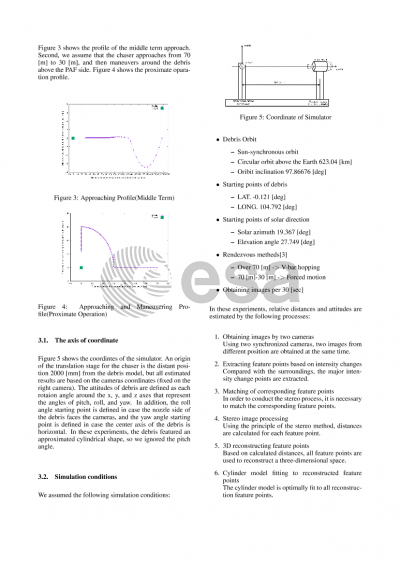
In this report, in order to confirm that stereo-vision is useful for applying to ADR, We conducted measuring experiments by fixing the distance of debris and cameras in 1000[mm] and changing two parameters: an optical condition and the attitude of debris. And we measured the relative distance of debris and cameras and the relative attitude of debris by stereo-vision system. These parameters significantly influence measuring precision. In this experiment, we use an optical simulator that is able to simulate an orbital optical condition, and use 1/30 scale H2A upper stage model as a target. This simulator has a three axis rotation stage for the debris model and a three axis translation stage for cameras. In addition, it has a simulated sunlight and a projection apparatus which can dynamically project Earth on the background of the debris model. Using the simulator, we can simulate any orbital optical condition.
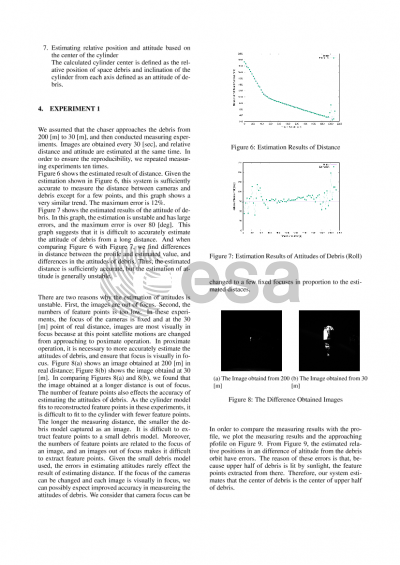
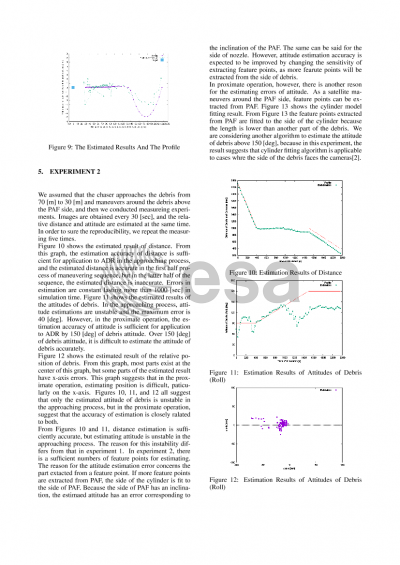
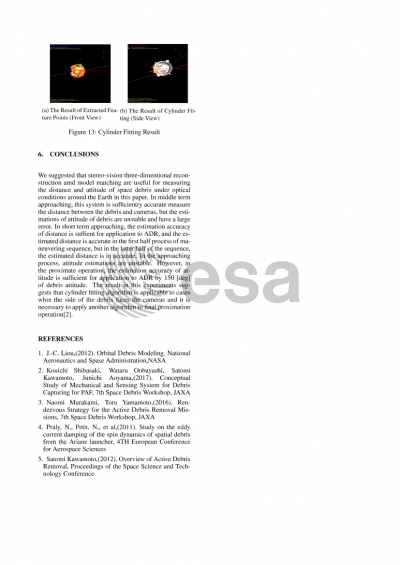
First, we conducted measuring experiments by fixing the attitude of model as the side of debris face to cameras, and changing optical condition continuously. In the result of this experiment, both the measured distance and attitude are accurate within plus or minus 10% except in the case with the simulated sunlight in the field of view. Finally, we conducted other measuring experiments by fixing the distance and optical condition and serially changed the attitude of model. As the side of debris face to cameras, errors of the measuring attitude are within 20 degrees. However, in the case that PAF side of debris turns toward cameras, it is difficult to measure the attitude of debris. At the same time, in any attitude, the measurement errors of the distance are 20-40%, which is larger than the worst result in the first experiment.
As the result of the experiments, it is difficult that, as the simulated sunlight in the field of view, we estimate the distance and attitude of debris, but we confirmed that stereo-vision is sufficiently able to apply to ADR in some conditions except the cases. Therefore, we are going to conducting new measuring experiments in the simulated orbital optical conditions. Through the experiments, we can find operation conditions when we carry out an active debris removal. In addition, the measuring accuracy is increasing by changing the stereo-vision system parameters and using another algorithm.
Preview