Document details
7
1
T. Flohrer, F. Schmitz
Abstract
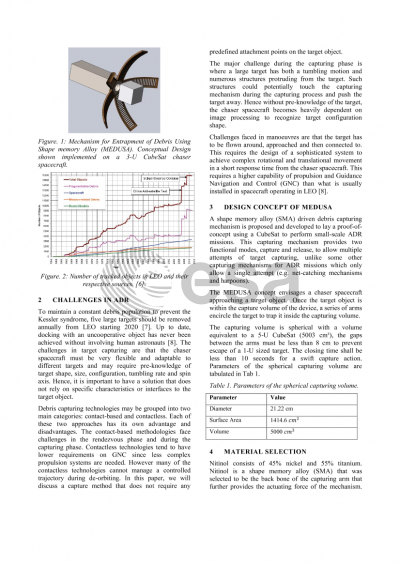
Active debris is becoming an important area of research due to the rapid growth of space debris and the need for some form of debris remediation. Debris remediation concepts fall into two general categories: contact-based and contactless. Contact-based schemes for debris capture have to overcome the challenges of capturing a non-cooperating object in space with no pre-designed attachment points. Various schemes involving, inter laid, nets and harpoons have been proposed. In this paper we explore the potential to use shape-memory alloy as a technological basis for debris capturing solution that can be used multiple times. A proof-of-concept prototype was developed at the University of Cape Town, named MEDUSA (Mechanism for Entrapment of Debris Using Shape memory Alloy). This has been designed as a validation payload for a CubeSat test platform to perform a small debris capture proof-of-concept demonstration. MEDUSA uses the shape-memory allow nitinol, which gives it the ability to assume pre-programmed "open" and "close" shapes after distortion. Each of the five arms of MEDUSA can attain both pre-programmed shades to allow reversible operations. This paper presents the design and development process from the conceptual design to the current M IV prototype. The device is currently undergoing thermal and vacuum testing at the Institute for Space Systems in Stuttgart to assess its performance under various environmental conditions.
Preview