Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Envisat is one of the largest objects in orbit and the largest satellite launched by ESA. It is located in low earth orbit at 767 km and, therefore, in a highly populated orbit region. The risk of collision with active satellites or space debris is high due to the high density of objects. Envisat lost contact to ground stations in April 2012 and poses an increased danger to other satellites due to possible collision. Hence, Envisat is a possible target for a deorbiting mission, where robotic satellites would capture Envisat and pull it into a reentry orbit. For such maneuver, the rotational velocity vector, i.e. the rotation axis and angular velocity, of the satellite is essential to be known.
We present estimations of the rotational motion of Envisat from a unique data set using 2D inverse synthetic aperture radar (ISAR) imaging with the Tracking and Imaging Radar (TIRA). ISAR systems exploit the relative motion between the radar (which is usually stationary) and the object to be imaged (which is moving and/or rotating). Through its motion, the object is illuminated from different aspect angles. Radar echoes received from the object are coherently processed to gain 2D high resolution images.
Unlike optical instruments, the resolution of ISAR images is independent from range. Furthermore, radar systems are active systems and can be operated day and night. Another advantage compared to optical systems is the fact that radar systems are independent of the cloud coverage above the radar or other weather related restrictions. Hence, TIRA is an ideal instrument for space reconnaissance and for instance to observe (uncontrolled) satellites over long time periods to detect and estimate their rotational motion, that usually change over time.
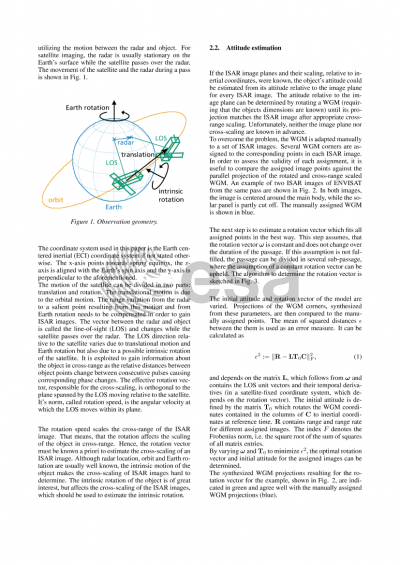
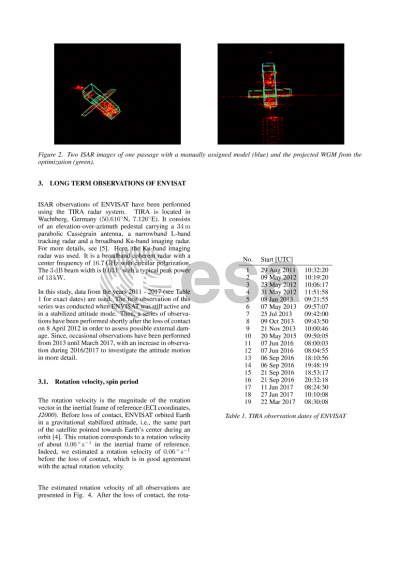
We use a set of contiguous 2D ISAR images acquired during the same overpass to estimate the satellite motion. In conjunction with a wire grid model (WGM), the rotational motion of the object can be derived for one passage under the assumption of a fixed rotation vector.
It is based on a two-step process. First the WGM is projected onto a series of ISAR images by manually selecting several points on the image and matching them with the corresponding points of the WGM. Then the initial attitude and rotational velocity vector are estimated following a maximum likelihood approach by searching for the initial attitude and rotational velocity vector that result in the projected WGMs that best fit the manual projections.
Several passages, acquired during several years, can then be used to estimate the change of attitude over time of a space object.
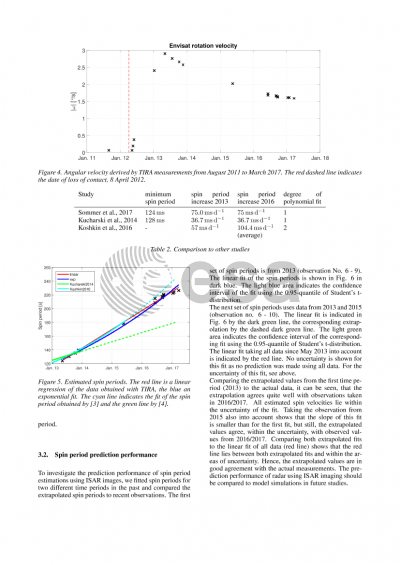
We focus our Envisat attitude estimations on the years 2011 - 2016, slightly before the loss of contact until 2016. It can be seen that Envisat rotated with 1°/s shortly after the loss of contact. The rotation increased thereafter and reached up to 3°/s during 2013. Since then, we observe a decrease in rotational motion, with 1.6°/s in 2016. These measurements are in good agreement with the satellite laser ranging measurements achieved by Kucharski et al. (2014) who observed a high rotation in April 2013 and a slight decrease thereafter.
In the final paper, we will resolve the satellite's motion in roll, pitch and yaw and will show how these components and the rotation vector are changing over time.
Preview