Document details
7
1
T. Flohrer, F. Schmitz
Abstract
e.Deorbit is a compelling mission concept that aims to address the most pressing debris challenge for Europe: the post-life disposal of ESA’s environmental satellite Envisat, which has the highest catastrophic risk-impact of any European spacecraft. This mission is unique in its operational complexity and challenges, and calls for a high fidelity system.
Overview of the study activities
In the frame of the Phase B1 of the ESA e.Deorbit project led by Airbus DS, a system design of the e.Deorbit mission and chaser was defined for the SRR based on the analysis of
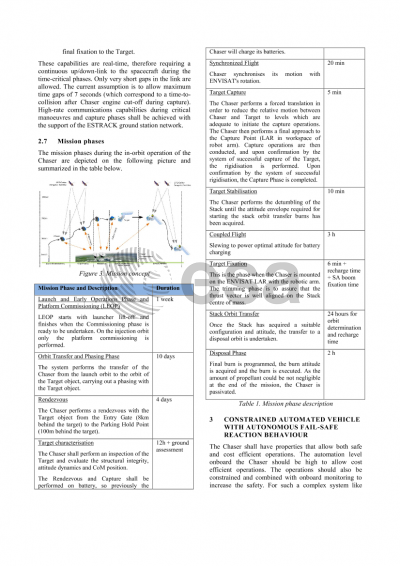
- the mission phases and the deorbiting,
- the mission hazards,
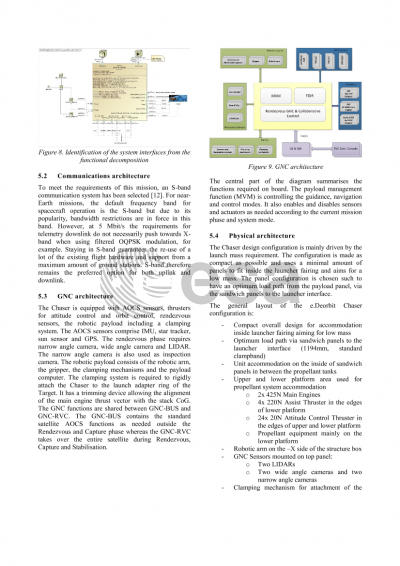
- the communications architecture,
- the functions and their decomposition,
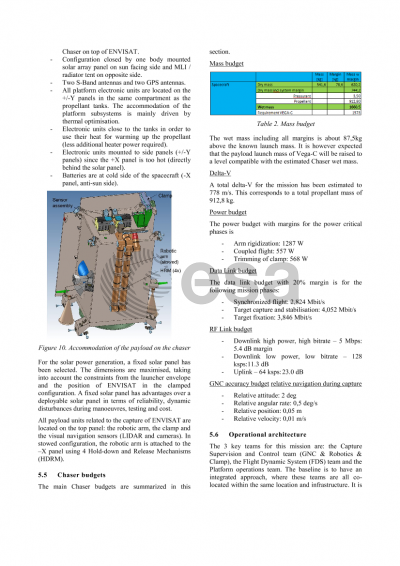
- the dynamic behavior of the chaser and the robot arm including the coupled-control,
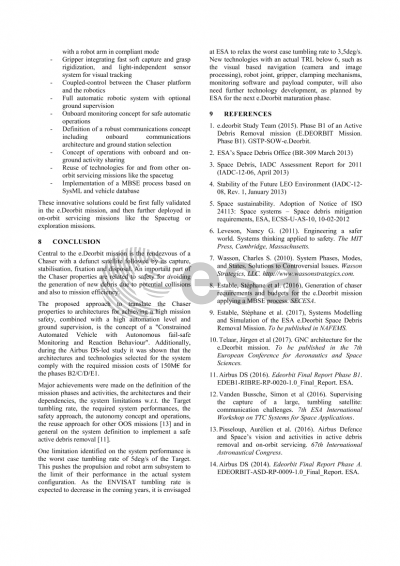
- the chaser design with the platform and the payload (arm, gripper, clamp, visual-based navigation) and the generation of the budgets (mass, delta-V and propellant, power, energy, data link, RF link, pointing accuracy for platform and arm),
- the FDIR system concept,
- the operations and the Flight Operation System,
- the risks, the reliability, the technology development, the verification logic and the costing,
- and the definition of the system and architecture requirements.
Major achievements
Major achievements were made on the definition of the mission phases and activities, the architectures and their dependencies, the system limitations w.r.t. the target tumbling rate, the required system performances, the safety approach, the autonomy concept and operations, the reuse approach for other OOS missions and in general on the system definition to implement a safe active debris removal.
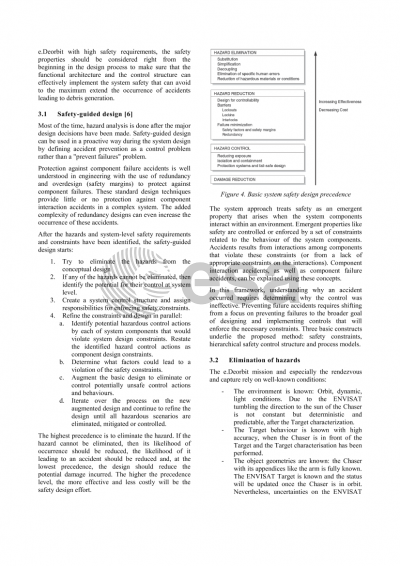
System safety
The e.Deorbit mission relies on strong safety constraints for the avoidance of debris generation and casualty on ground. The definition of all domains of the mission shall consider these safety aspects for avoiding to the maximum extend the occurrence of such accidents. An architecture was defined for mitigating the main mission risks to a level compatible with the MSRD and the proper execution of the mission. The industrial team is confident that an acceptable level of mission risks can be reached, if a combination of architectural decisions, as defined during the study, is implemented.
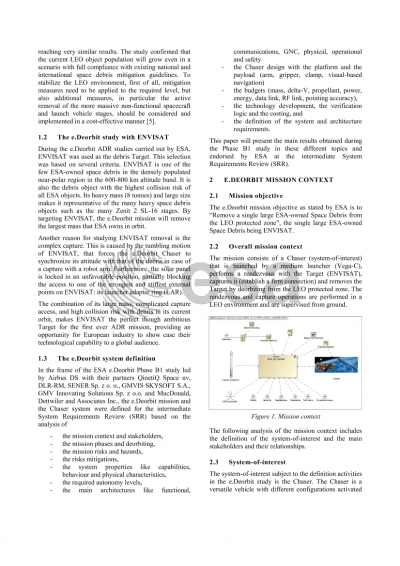
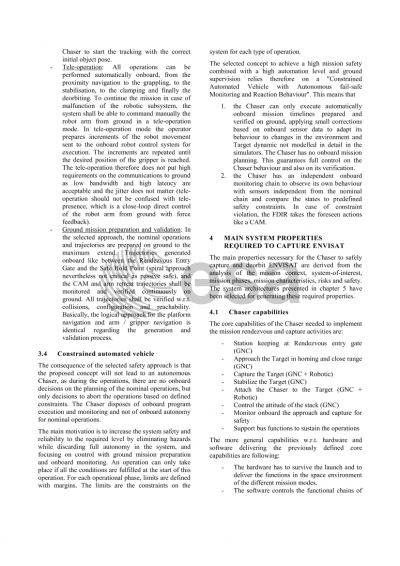
System definition
The chaser spacecraft is a constrained automated vehicle with autonomous fail-safe monitoring and reaction behavior functions. All activities required to approach, synchronize, capture and fix the target can be performed automatically onboard, with the corresponding autonomous monitoring functions using independent sensors and CPU. The autonomous monitoring functions are capable of taking onboard decisions if constraint violations are detected to abort the operations and to escape the surrounding of the target without creating debris.
The ground supervision functions are intended to provide independent ground supervision and to check the chaser status health at the control points after chaser reconfigurations. Therefore, the ground segment is designed to minimize data latency, allow a high bandwidth and maximize operator representation of the orbital configuration from multiple sources. All operations and trajectories are verified on-ground prior to their onboard automatic execution.
Innovative solutions
In the course of the study, innovative solutions were defined in following domains:
- In-orbit characterization of the target based on measurements from chaser sensors
- Navigation to uncooperative targets in all lighting conditions
- Synchronized flight with a tumbling target
- Capture and stabilization of tumbling target with a robot arm in compliant mode
- Gripper integrating fast soft capture and grasp rigidization, and light independent sensor system for visual tracking
- Coupled-control between chaser platform and robotic
- Full automatic robotic system with optional ground supervision
- Onboard monitoring concept for safe automatic operations
- Definition of a robust communications concept including onboard communications architecture and ground station selection
- Concept of operations with onboard and on-ground activity sharing
- Reuse of technologies for other on-orbit servicing missions like the spacetug
- Implementation of a MBSE process with SysML, CDP and Matlab/GNCDE
Preview