Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Within the last decades, Space Debris has become a growing concern for active satellites. To sustain the current environment around Earth, mitigation measurements such as improved observation or the implementation of post-mission disposal have taken place and are under further development. Regarding long-term sustainability, a repeated active debris removal of 5 to 15 large object per year will have to be included to stabilize the orbits and prevent a cascade effect of colliding objects. But the safe und successful implementation of standardized close vicinity operations in space is a huge challenge. Along with political and legal challenges, any developed technology or concept needs to be tested sufficiently – hardware and software wise. For the latter, simulations that mirror the missions conditions, demands and requirements are required.
The presented work is based on the architecture of a mission to actively remove at least 5 SL-8 Rocket bodies per year. After the introduction of the concept of the Autonomous Debris Removal Satellite - #A (ADReS-A), the derived simulation is showcased.
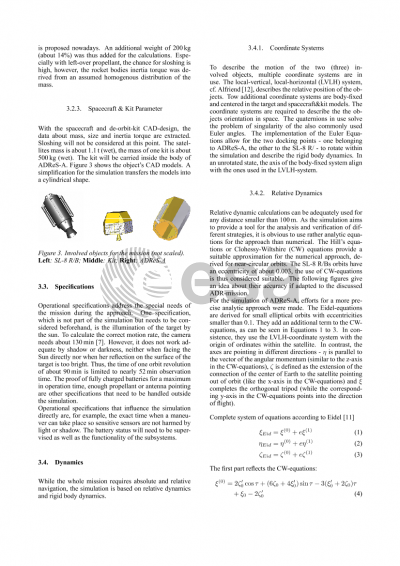
ADReS-A targets multiple SL-8 rocket bodies to provide them with a de-orbit kit for a controlled re-entry. The kits are attached on the nozzle of the target with the help of a robotic arm. As the procedure requires flexibility, ADReS-A will carry one kit at a time to a preselected target. The other kits await their employment in a parking orbit 30 km below the targets orbit.
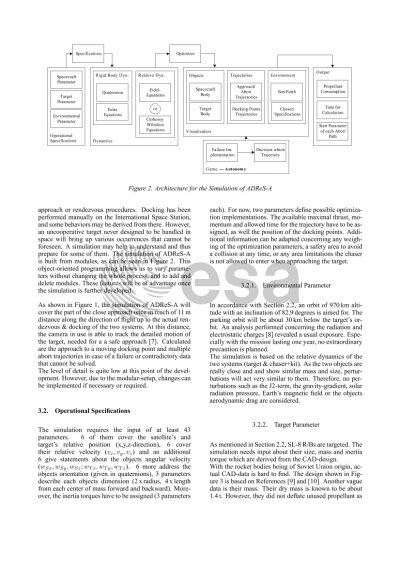
Based on ADReS-A’s capabilities, a simulation architecture is created and discussed on the perspectives of required modules, functionalities, optimization possibilities, adjustments to reality, autonomy integration and failure handling.
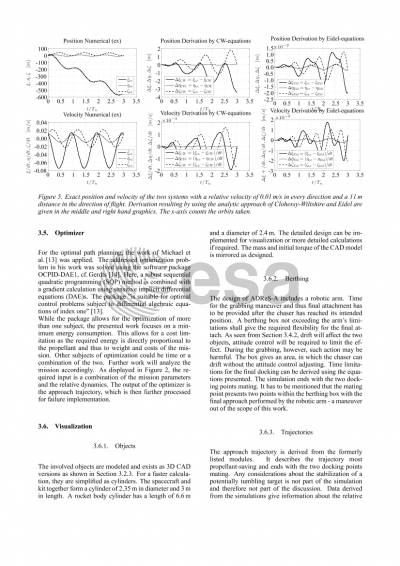
The purpose of the simulation is the testing of different strategies (for now time and fuel wise) for a safe approach of an uncooperative target, considering a few possible failure scenarios for the application. As close vicinity is the focus of the simulation, the objects are 11 m apart at the beginning. ADReS-A, carrying a kit, approaches the target - the trajectory is calculated with an optimization tool focusing on the fuel consumption within a given timeframe. During that approach, a failure is introduced and the satellite has to react based on its momentary position and capabilities. The calculations are built from Clohessy-Wiltshire equations for relative navigation. For a possible optimization of precision, calculations for small eccentricities are presented and can be implemented if required.
The implementation of autonomy is favored for the close approach as a stable communication to the ground station cannot be guaranteed. Moreover, drift may led to a collision if the satellite does not react in time. Different failure scenarios and autonomy concept are thus included in an additional discussion.
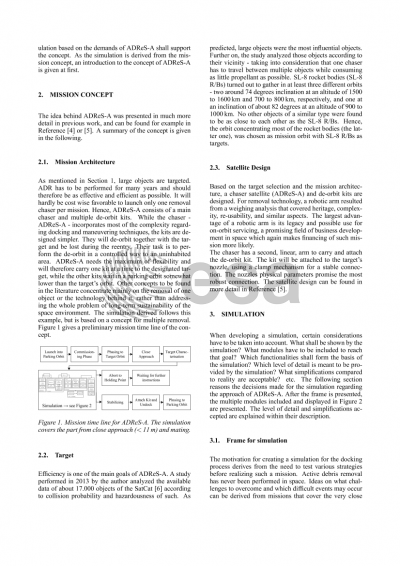
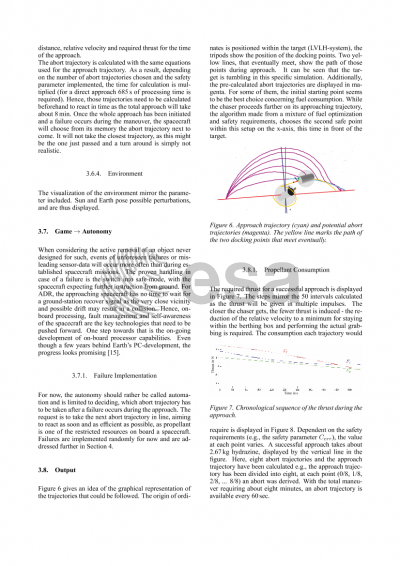
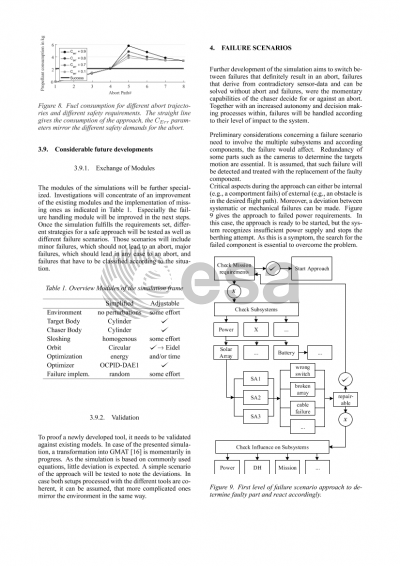
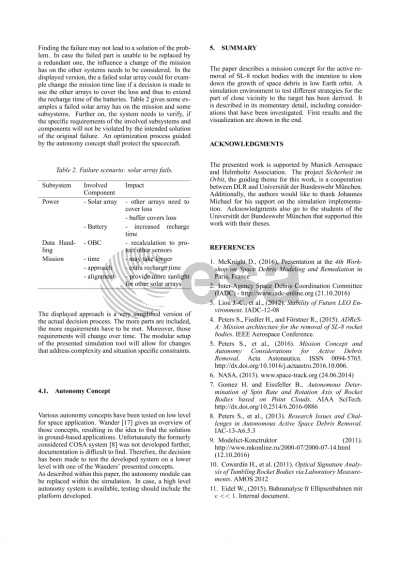
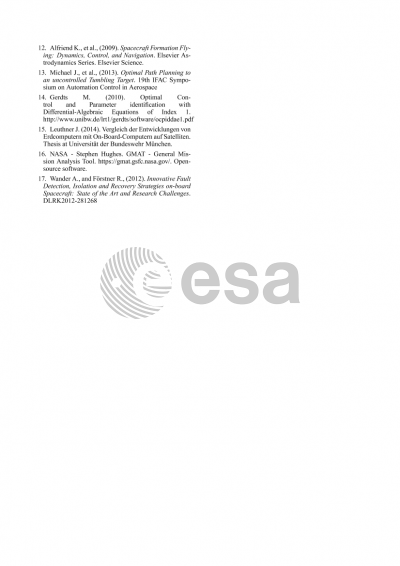
Preview