Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Recent statistics revealed around 1682 spent orbital stages orbiting the Earth. There are more than 800 spent orbital stages in the LEO orbits with the total mass about 1199 tons. Collisions of these objects with other debris can generate thousands of smaller objects, which would threaten sustainable use of the near-Earth space. Recent studies show that at least five debris objects must be actively removed per year.
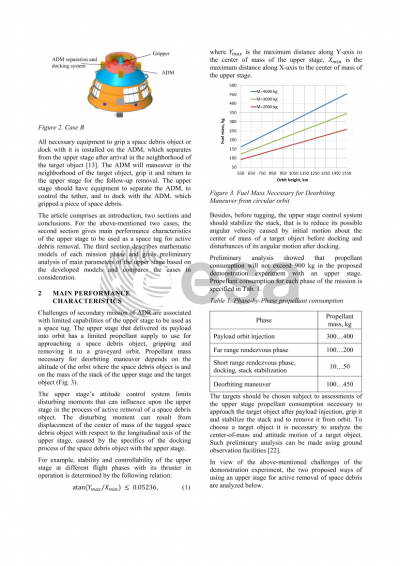
In this paper, we consider a flight test experiment for removal of non-cooperative tumbling orbital stage debris. It is supposed that the upper stage of the of the rocket carries a module which solves specific tasks of mission (ADR). The purpose of the experiment is to work out key elements of piggyback ADR system including the guidance and control system, capture or docking device of the ADR module and test debris de-tumbling methods. The ADR module consists of two parts. The first part is attached to the upper stage and includes controlled tether reel mechanism, operating in winding and unwinding tension control. The second part is an autonomous docking module (ADM). The ADM module separates from the upper stage near the debris keeping a tethered connection with the carrier. The autonomous module has a docking mechanism, autonomous control system and propulsion system for maneuvering near the debris object. We consider Volga upper stage as an example of a carrier for ADM.
The following tasks are to be performed during the flight test: 1) Injection of the main payload into the desired orbit. 2) Performing an orbital maneuver to transfer the upper stage to the interception orbit of the preselected debris. 3) Separation of the ADM from the upper stage keeping the tethered connection between the bodies. 4) Docking with the debris object using a probe-cone mechanism of the ADM. 5) De-tumbling the debris using thrusters of the docking module. 6) Tether assisted docking with the upper stage using thrusters of the ADM. 7) De-orbiting of the whole system (the upper stage, ADM module, and debris object) using the propulsion system of the upper stage.
The following tasks are solved in the present study based on a comprehensive analysis of the upper stage Volga performance, known distribution of the debris objects and possible parameters of the main payload. We choose debris object taking into account its orbit and expected angular rate. Next, we describe the requirements for the primary payload including mass and injection orbit. Finally, we find design parameters of the autonomous docking module for different docking schemes.
Preview