Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Introduction
More than 23000 objects larger than 10 cm are regularly tracked and LEO represents the most congested zone. Even if all space launches were halted tomorrow, the amount of debris would continue increasing. The most effective way to stabilise debris population is to remove the large non-functional objects from the most populated orbits which are the source of small debris. The term used to remove a large object from orbit is Active Debris Removal (ADR). However, capturing and deorbiting an uncooperative object is extremely challenging; such a mission has never been performed and requires a number of key technology advancements.
Current Status of the System Studies
The e.Deorbit mission was first studied in ESA’s Concurrent Design Facility (CDF) at ESTEC in 2011. Following another feasibility assessment in 2012, due to the knowledge that Envisat would be uncooperative during capture, 3 parallel and competitive Phase A activities were initiated. The three consortia were led by Airbus, OHB and Thales Alenia Space, and these activities were conducted in 2015. Presently, e.Deorbit is in Phase B1 with two separate competitive and parallel activities. The intermediate System Requirements Review (iSRR) is being held in Q4 2016. Following the Phase B1, the e.Deorbit Consolidation Phase will run across Q2 and Q3 in 2017. This activity aims to address the main points identified during the iSRR while also maturing the:
• Platform design and capture techniques
• Design of the net capture system
• Design of the robotic visual servoing system
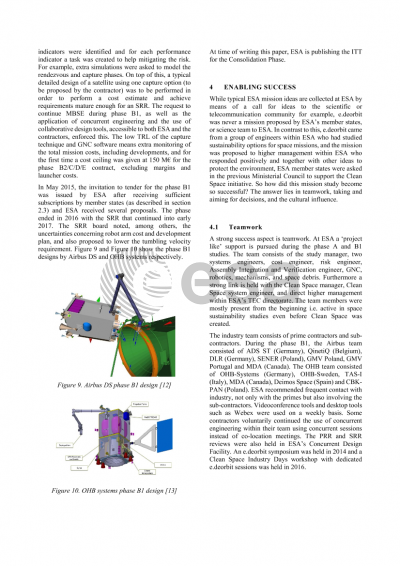
• Definition of the GNC avionics test bed architecture.
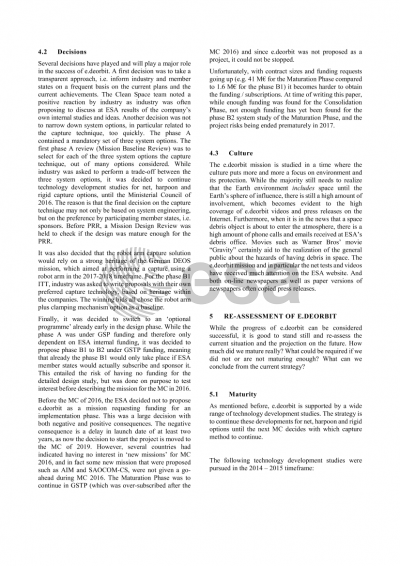
Technology Developments
Throughout the various system studies a number of key technology developments have been identified for development, namely in the areas of:
1. Advanced Image Processing Systems are required to enable the extraction of dynamical and kinematical properties of the object. This will be performed on the inputs from sensors such as a LIDAR, multispectral camera, visual camera, and also within the visual servoing system of the robotic arm.
2. Complex Guidance Navigation and Control (GNC) drives the need for intricate control algorithms which are fundamental to take the inputs from the image processing and from this actuate the spacecraft to ensure a safe and controlled synchronized approach to rendezvous with the debris.
3. Innovative Robotics are being studied in order to minimise the mission risk such throw nets and robotic arm. The first one have the advantage of scalability which enables them to capture a large target. A robotic arm with a gripper has the capability to capture appendages on spacecraft.
The Next Step: e.Deorbit’s Maturation Phase
Following on from the e.Deorbit Consolidation Phase of e.deorbit, the proposed schedule for the e.deorbit Maturation Phase foresees the Preliminary Definition Phase commencing in mid-2017, followed by technology developments six months later. This implementation enables a flow down of requirements, ensuring that the technology developments are driven by requirements from the system studies. Similarly the technology developments finish six months before the end of the Detailed Design Phase to ensure adequate time for an update to the system design.
The e.Deorbit Maturation Phase proposed at the Ministerial Council in 2016 consisted of:
- Detailed Design Phase 13.5 M€
- Robot developments to TRL 6: 11.5 M€
- GNC for ADR developments to TRL 6: 10 M€
- Net development with sounding rocket test: 6 M€
Following the e.Deorbit Maturation Phase, the Implementation of e.Deorbit will be proposed at the Ministerial Council in 2019.
Preview