Document details
7
1
T. Flohrer, F. Schmitz
Abstract
Space tethered systems can be used for many applications. They can be used for orbital maneuvers, orbital “mail”. They can be applied for the cleaning of orbit from space debris. The problems of tethered systems dynamics are correct deploying and then dynamical control and stabilization of the whole system in the needed orientation with respect to the orbit. In this work the dynamics of a space tethered system that consists of a big satellite moving along a circular orbit and smaller satellites attached to the bigger one with the help of flexible long tethers is considered. Dynamic processes of deployment, stabilizing of the space tethered system for its application for the cleaning of a geosynchronic orbit from the elements of space debris are studied.
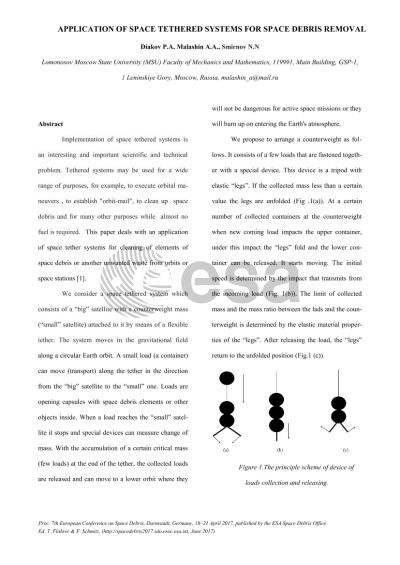
In 2004, a space tethered system was proposed by V.A.Chobotov. This system was considered to evacuate the containers with space debris elements along the tethers to the lowers or higher orbits. The system consists of a “big” satellite (catching-satellite where space debris elements are accumulated), two smaller counterweight satellites and tethers stretched between them. The tether’s length is about 30 km. One part of the system is stabilized along the local vertical in the direction from the big satellite to the Earth, the other - in the direction to higher orbits. Small loads can move along the tether in the direction from the big satellite to the counterweights. When the load reaches a smaller satellite it stops and special devices can measure change of mass. With the accumulation of a certain critical mass (few loads) at the end of the tether, the collected loads are released and can move to a lower or higher orbit, where they will not be dangerous for active space missions or they will burn up at entering the Earth's atmosphere.
Difficult complex motion of the load and tether occurs in the process of system deploying. In dynamic this motion can lead to undesirable longitudinal and transverse vibrations which can lead to mission collapse. A special technical device located on the big satellite is proposed for stable movement of the whole system along a certain calculated trajectory. The conditions for stabilization were obtained.
After deployment and stabilization the system is ready for transporting containers with space debris along the tether.
For certain relations between the loads, counterweights masses the velocities of containers can be small and the motion is stable and it can be considered as quasi-static. The influence of dynamic effects in the tether is negligible in compare with the influence of mass forces (Coriolis force, gravity). In this approach we can obtain relationships between the masses of loads and counterweights for stable transporting.
The numerical results confirmed analytical conclusions and show the strong dependence of motion stability of loads along the tether on the relation between the masses. A principal mechanism of deploying is considered for dynamic boundary control for the stable movement of the whole system. Also a device for serial releasing of loads is proposed.
Preview