Document details
6
1
L. Ouwehand
Abstract
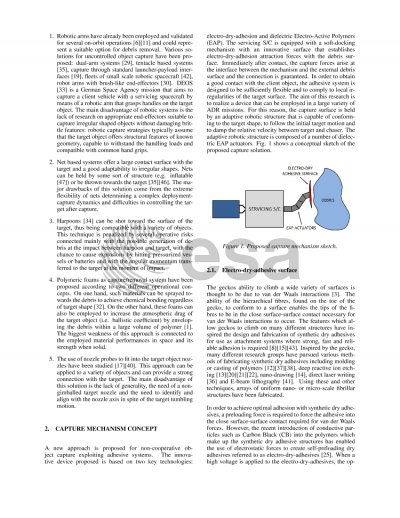
Over the last decades, the interest around Active Debris Removal missions grew considerably due to the increasing threat represented by the space debris populating near-Earth orbits. This paper presents the concept of a soft docking system suitable for capture of non-cooperative, large objects regardless of shape, surface features and motion. The innovative concept exploits a compliant electro-dry adhesive surface for mating and a robotic support structure composed by smart-material actuators. The adhesion surface combines electrostatic attraction and van der Waals forces; it is highly flexible and compliant to local irregularities of the target surface. The proposed capture concept increases the operative flexibility, tolerating critical scenario uncertainties (i.e. target shape, motion, mass). The active support structure can be controlled to adapt to the target object external geometry and to damp relative motion between target and chaser. Preliminary analysis was conducted both assessing the expected capture loads and the available adhesion forces.
Preview