Document details
5
1
H. Lacoste
Abstract
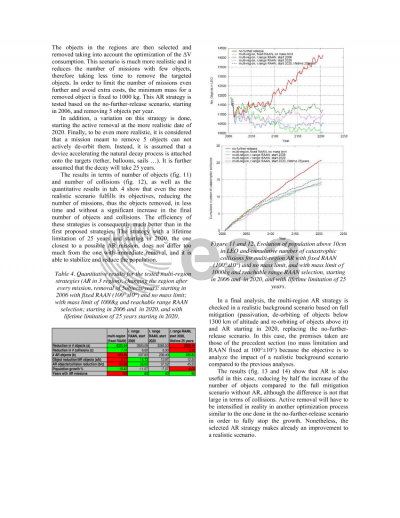
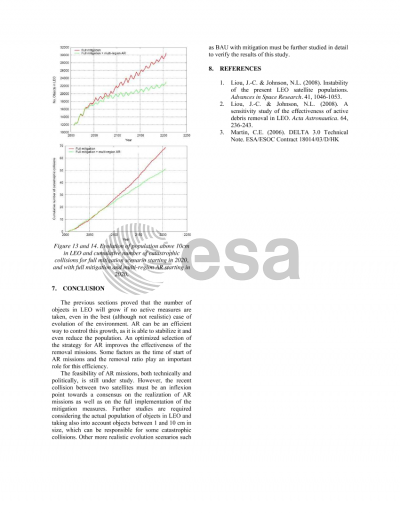
Some recent studies on the future evolution of space environment suggest that the number of objects in orbit might be unstable [1, 2]. Instability means that the population of objects in space will grow even when no further objects are added to space (i.e. no launches, no fragmentation events). This growth is mainly due to collisions caused by fragments generated by other collisions (so-called feedback collisions). This kind of instability indicates that the existing and currently proposed mitigation measures are not sufficient to stop the increase of space debris even when they are strictly implemented. In the past years, the idea of actively removing objects from space has been raised in order to improve the tendency. Active removal (AR) implies robotic missions with the capability to dock to completely passive spacecraft or rocket bodies and to bring them into an orbit with significantly reduced lifetime.It can be expected that the evolution of the environment depends very much on the orbital region in which the removal missions will operate and on the type of objects removed. However, existing studies on active removal have not yet identified target regions and candidate objects so far. Another important factor will be the time in which removal activities begin. It is probable that the number of missions per year or decade can be reasonably limited when the time distribution is optimized. So far there seems to be no real attempt to identify such key parameters. In this paper these key factors will be analyzed.
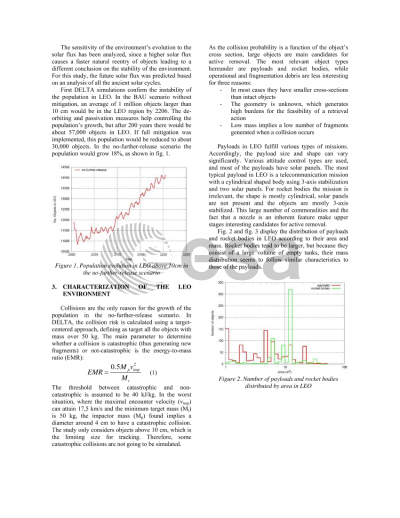
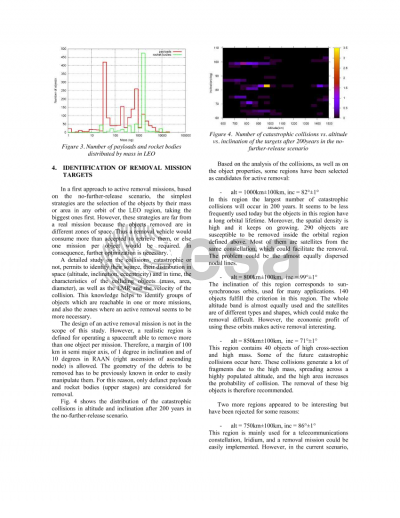
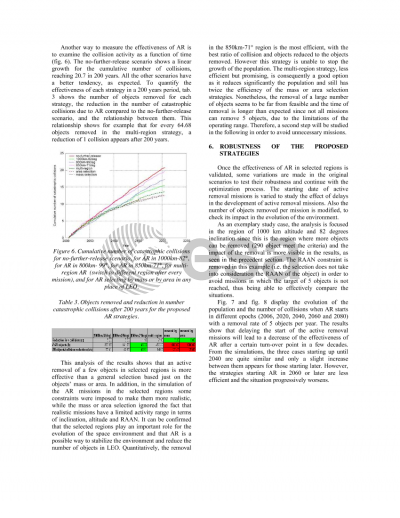
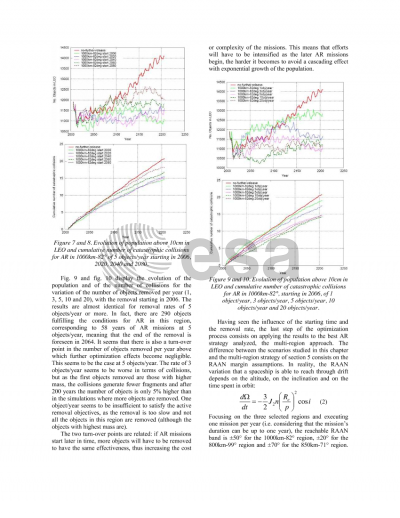
Preview