Document details
2
1
T. Flohrer, R. Moissl, F. Schmitz
Abstract
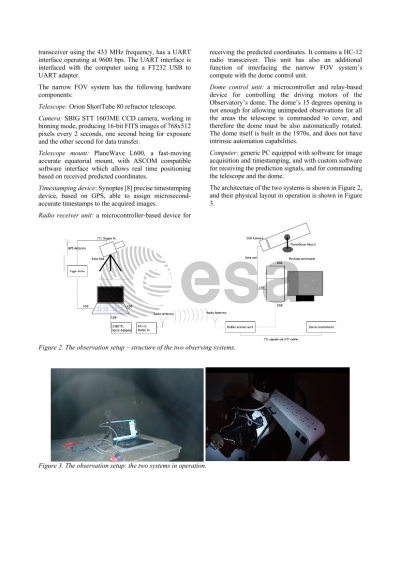
The Astronomical Observatory of Cluj-Napoca, using the Feleacu observation site (latitude 46.71040333 N, longitude 23.593594666 E, altitude 787.560 m), is involved in the European SST effort, using its telescopes to track satellites of various orbits. For the Low Earth Orbit (LEO) satellites, the Observatory’s team uses the Orion ShortTube 80 refractor telescope, mounted on the fast-moving PlaneWave L600 equatorial mount system, and the images are captured using the SBIG STT 1603ME CCD camera in binning mode, allowing a frame capture rate of 30 frames a minute, and an angular measurement error of less than 10 arcseconds.
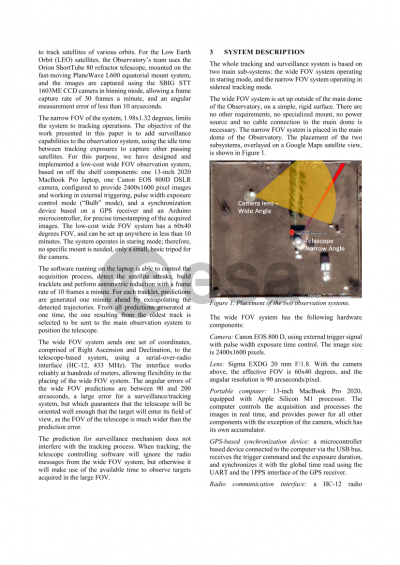
The narrow field of view of the system, 1.98x1.32 degrees, limits the system to tracking operations. The objective of the work presented in this paper is to add surveillance capabilities to the observation system, using the idle time between tracking exposures to capture other passing satellites. For this purpose, we have designed and implemented a low-cost wide field of view observation system, based on off the shelf components: one 13-inch 2020 MacBook Pro laptop, one Canon EOS 800D DSLR camera, configured to provide 2400x1600 pixel images and working in external triggering, pulse width exposure control mode (“Bulb” mode), and a synchronization device based on a GPS receiver and an Arduino microcontroller, for precise timestamping of the acquired images. The low-cost wide field observation system has a 60x40 degrees field of view, and can be set up anywhere in less than 10 minutes. The system operates in staring mode; therefore, no specific mount is needed, only a small, basic tripod for the camera.
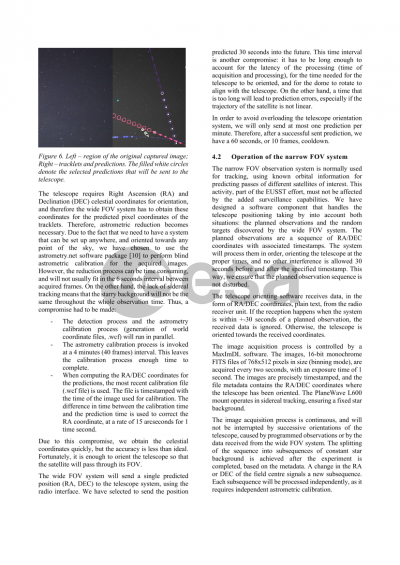
The software running on the laptop is able to control the acquisition process, detect the satellite streaks, build tracklets and perform astrometric reduction with a frame rate of 10 frames a minute. For each tracklet, predictions are generated one minute ahead by extrapolating the detected trajectories. From all predictions generated at one time, the one resulting from the oldest track is selected to be sent to the main observation system to position the telescope.
The wide field of view system sends one set of coordinates, comprised of Right Ascension and Declination, to the telescope-based system, using a serial-over-radio interface (HC-12, 433 MHz). The interface works reliably at hundreds of meters, allowing flexibility in the placing of the wide FOV system. The angular errors of the wide FOV predictions are between 90 and 200 arcseconds, a large error for a surveillance/tracking system, but which guarantees that the telescope will be oriented well enough that the target will enter its field of view, as the FOV of the telescope is much wider than the prediction error.
The prediction for surveillance mechanism does not interfere with the tracking process. When tracking, the telescope controlling software will ignore the radio messages from the wide FOV system, but otherwise it will make use of the available time to observe targets acquired in the large FOV. The end result is a system that has a throughput of at least one LEO tracklet per minute, measured with the narrow FOV system’s high angular accuracy, and combining surveillance and tracking capabilities.
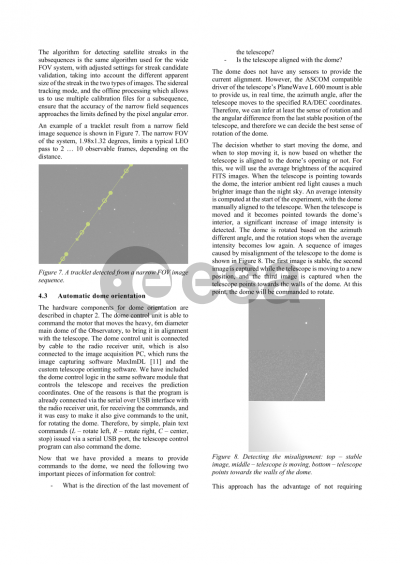
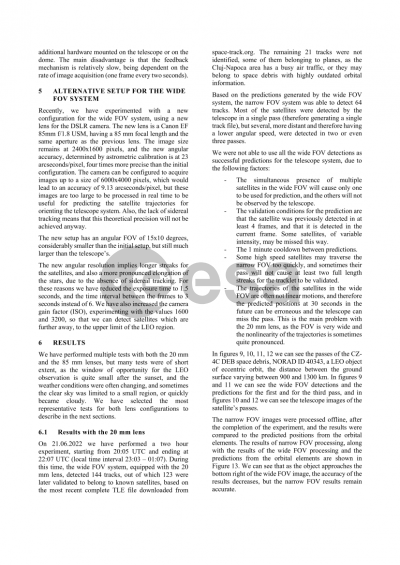
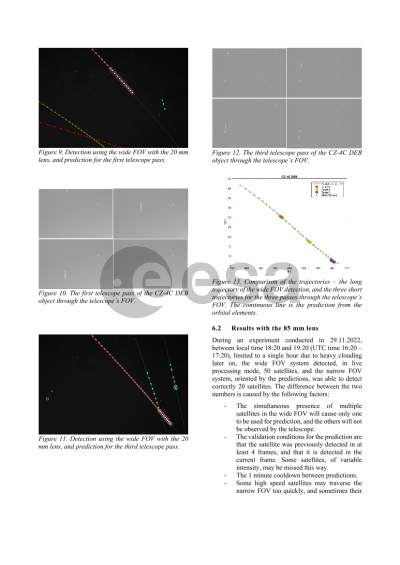
Preview