Document details
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
With the advancement of space technology, the rate of spacecraft launches has steadily increased, leading to growing congestion in Earth’s orbital environment. As a result, the likelihood of in-orbit break-ups has increased consistently, raising significant safety concerns about the potential collision risk posed by debris clouds to operational spacecraft.
Immediately following a break-up event, the process of tracking and cataloging every fragment begins. However, it takes time before the state of each piece of debris can be accurately estimated. This delay creates a "blackout" period during which satellite operators are unable to take mitigation actions to reduce collision risks. During this time, Conjunction Data Messages (CDMs) cannot be issued, making classical collision risk assessment methods for 1-vs-1 scenarios not suitable. Additionally, very small fragments often go untracked due to technological limitations of current sensors, potentially leading to a dangerous underestimation of the collision risk.
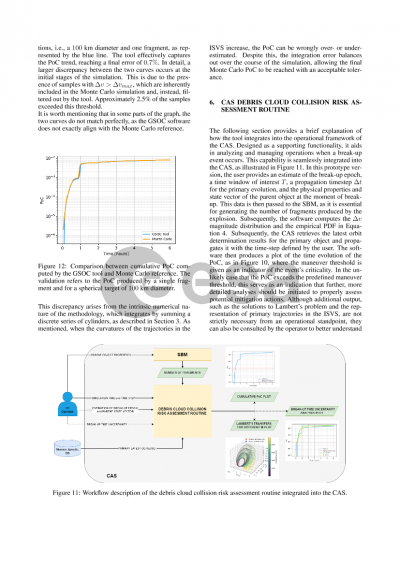
Within this framework, the Flight Dynamics (FD) team at the German Space Operations Center (GSOC) is developing a tool to evaluate the threat of fragmentation events to their assets, enhancing the capabilities of the existing and well-established Collision Avoidance System (CAS).
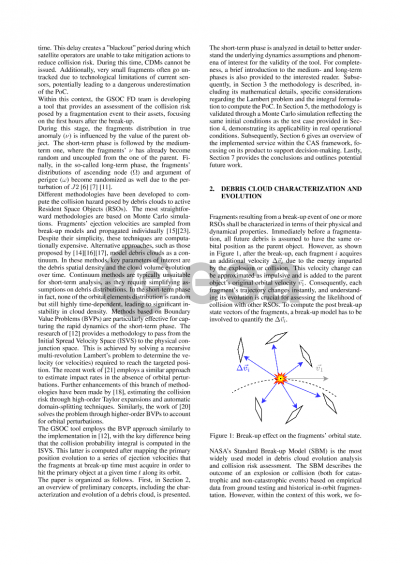
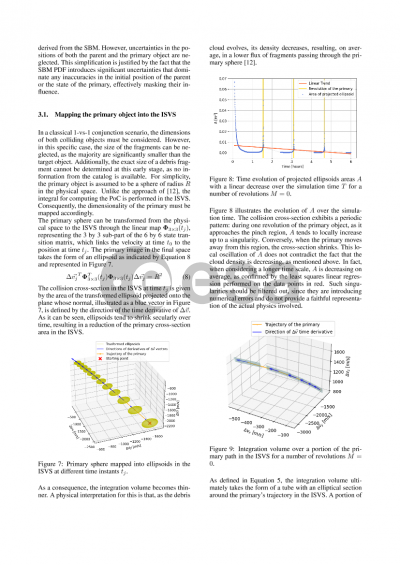
In detail, the proposed methodology maps the position evolution of a primary spacecraft into the initial spread velocity space at break-up time. This last is a conceptual space, where each point represents a ΔV caused by the break-up event. As the primary moves along its trajectory in physical space, its positions are mapped to the initial velocity a fragment would need at the moment of break-up to reach the primary at that specific location. This mapping is achieved by recursively solving a series of multi-revolution Lambert problems, with boundary conditions determined by the parent object’s position at break-up and the primary’s position at any given time. The collision risk is then calculated integrating all possible ΔVs that might result in a future collision over the initial velocity distribution of the cloud given by NASA’s Standard Break-up Model (SBM).
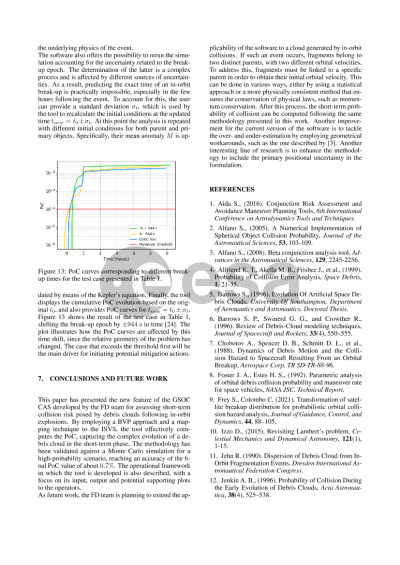
This results in a cumulative metric over time, which is then compared against a typical maneuvering threshold—a value at which operators would normally act to mitigate a conventional collision event.
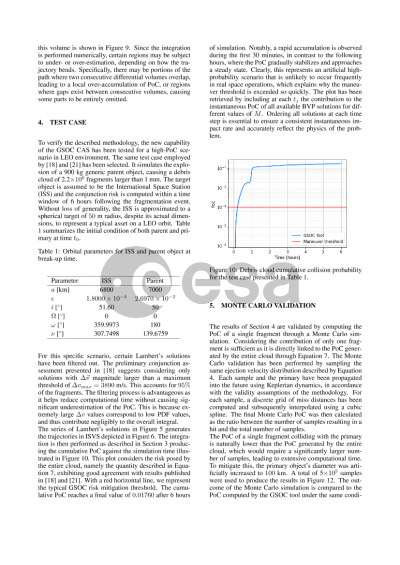
The approach is tested on a benchmark case from the literature to demonstrate its effectiveness and applicability to real-world scenarios. Additionally, the sensitivity of the methodology to uncertainties in the break-up epoch is also examined. In particular, multiple break-up times are considered to identify the worst-case scenario in which the Probability of Collision (PoC) exceeds the maneuvering threshold at an earlier time, thereby allowing for a more effective and safer mitigation strategy.
Preview