Document details
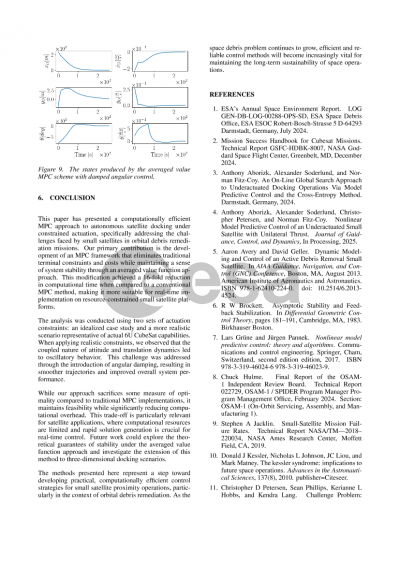
9
1
S. Lemmens, T. Flohrer, F. Schmitz
Abstract
With growing interest in space-based technologies, some companies and government organizations have shown interest in developing spacecraft for satellite servicing [1,2]. As spacecraft launches increase, so do the number of small satellites in Earth’s orbit and, disproportional to that, the number of mission failures [3,4]. Furthermore, many satellites have limited lifespans due to fuel constraints. Satellite servicing operations have the potential to extend the lifespan of space-based assets by providing refueling, basic maintenance, and repair. Additional capabilities, such as deorbiting irreparable debris, are also being explored. However, with what seems to be a growing number of mission failures, it is important to focus on developing fault-tolerant systems to prevent spacecraft from becoming debris—and ensure the service vehicles themselves do not contribute to the problem.
The case study presented herein follows the parameters outlined in a challenge problem posed by Petersen et. al. [5]. The paper demonstrates a planar underactuated docking problem, wherein a 6U CubeSat is capable of orienting itself about an axis perpendicular to its planar motion and has translation actuation about a unilateral longitudinal axis. Satellite parameters and mission constraints are extensively detailed in this work, as well as a survey of some promising methodologies that could be used to offer a solution. While no doubt an interesting problem, it comes with its challenges. Various analyses have shown that the formulation of this case study creates a problem that is not controllable or stabilizable at the origin using linear or classical approaches such as lyapunov's direct method.
The research herein analyzes a fault-tolerant service vehicle by providing a solution to the underactuated docking problem with a focus on stability and computational efficiency. Given the control and stability challenges listed above, a geometric control analysis [6] and Brockett’s condition [7] suggest that a stable feedback law can be found, but it cannot be continuous and time invariant. This leaves methods like model predictive control (MPC)--which inherently generates a discontinuous control law--time varying control, control over a manifold, hybrid control, and reinforcement learning. The analysis herein provides a solution to the benchmark problem using MPC without terminal constraints or terminal cost. The negation of these key stability ingredients allows for a reduction in the prediction and control horizon variables, and vastly increases the computational efficiency of the controller. Theorem 6.18 presented by Grune and Pannek in [8] suggests that stability is not lost with this approach and that methods exist to guide the design of both the prediction horizon variable and the stage cost. We have identified key stability conscious design metrics and have numerically demonstrated our algorithm’s effectiveness.
Grune and Pannek outline in [8] three requirements for stability of an MPC without terminal cost or constraints. First, the optimal running cost must be constrained between two Kappa infinity functions. Second, the value function of the MPC must be upper bounded by some exponential function to ensure exponential controllability. Third and finally, the relaxed dynamic programming function must produce a scaling constant in (0,1]. This paper discusses methods of demonstrating these stability requirements on-line to guide the design of this controller and presents numerical results for validation.
References
[1] Hulme, C., “FINAL REPORT OF THE OSAM-1 INDEPENDENT REVIEW BOARD,” Tech. Rep. 022729, OSAM-1 /SPIDER Program Manager Program Management Office, Feb. 2024.
[2] Davis, J. P., Mayberry, J. P., and Penn, J. P., “On-Orbit Servicing: Inspection, Repair, Refuel, Upgrade, and Assembly of Satellites in Space,” Center for Space Policy and Strategy, Aerospace, 2019.
[3] “Mission Success Handbook for Cubesat Missions,” Dec. 2024.
[4] Jacklin, S. A., “Small-Satellite Mission Failure Rates,” Technical Report NASA/TM—2018– 220034, NASA Ames Research Cen-ter, Moffett Field, CA, 2019.
[5] Petersen, C. D., Phillips, S., Hobbs, K. L., and Lang, K., “Challenge Problem: Assured Satellite Proximity Operations,” Proc. AAS/AIAA space flight mechanics meeting, Virtual, 2021.
[6] Soderlund, A. A., and Phillips, S., “Hybrid Systems Approach to Autonomous Rendezvous and Docking of an Underactuated Satellite,” Journal of Guidance, Control, and Dynamics, Vol. 46, No. 10, 2023, pp. 1901–1918.
[7] Brockett, R. W., “Asymptotic Stability and Feedback Stabilization,” Differential Geometric Control Theory, Birkhauser Boston,Cambridge, MA, 1983, pp. 181–191.
[8] Grüne, L., and Pannek, J., Nonlinear model predictive control: theory and algorithms, 2nd ed., Communications and control engineering, Springer, 2017.
Preview